初めての方へ~KXR編~
組み換えがコンセプト!
KXRシリーズは、自由に組換ができるロボットキットです。多彩なフレームパーツを組み合わせ、サーボを連結していくことで、あなたが欲しいロボットを組み立てることができます。二足歩行ロボットはもちろん! 6本足のロボットやアームロボット、カメ型のロボットなどなど、用途に合わせて形を変えていきます。
このページでは、基本的なアイテムの紹介からKXRでできることまでご紹介します。





バリエーション豊かなロボットラインアップ
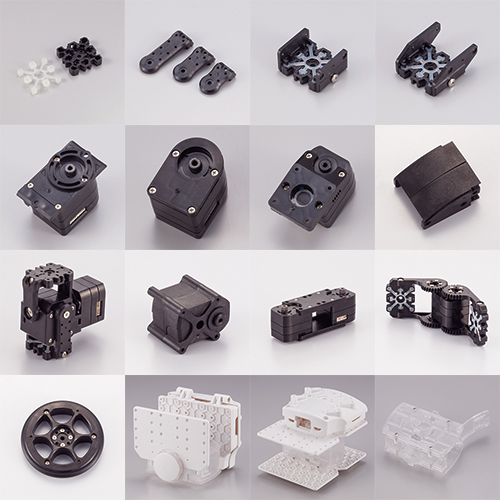
KXRシリーズの各種セットをご紹介します。
KXR アドバンスセットA Ver.2
アドバンスセットAは、6脚型や恐竜型ロボットをはじめ、ヒューマノイド型のグリッパーハンド付き仕様などを多彩なロボットが組み立てられます。また、KXRシリーズすべてのパーツが揃っていますので独自に組み換えてオリジナルロボットを完成させることもできます!
さらに、セットに含まれる18個のサーボの内、6個がハイトルクサーボですので、安定性も抜群です!
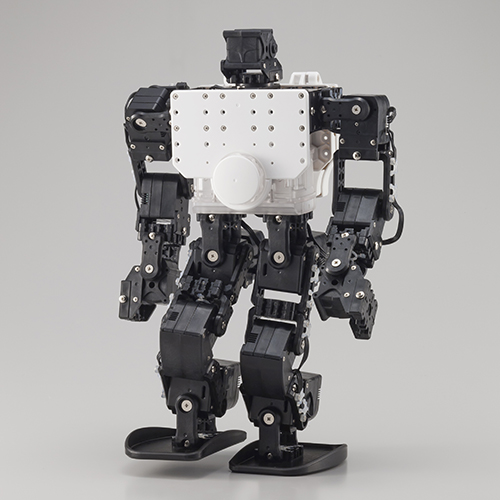
KXR-L2 ヒューマノイド型
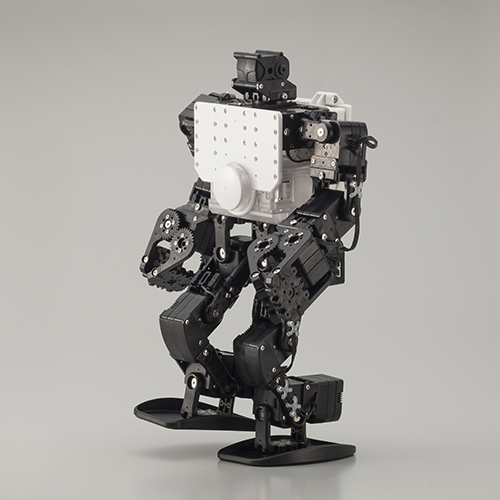
このセットを組み立てることで、二足歩行ロボットが完成します。軽量で手軽に扱える二足歩行ロボットですので、初心者の方にもお勧めです!オプションのジャイロセンサーを搭載すればさらに歩行が安定します。もちろん、KXRの各種フレームパーツに対応していますので、組み換えて自分だけのオリジナルロボットに改造することもできます。
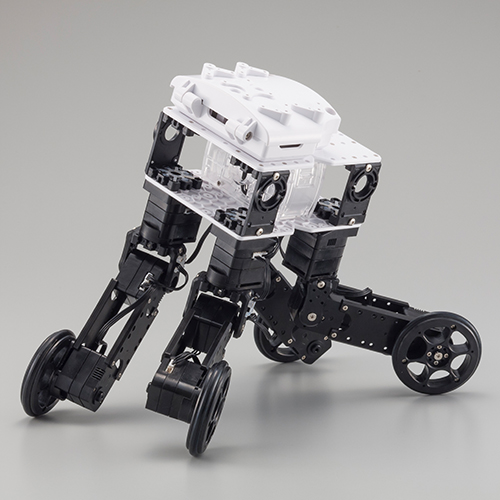
KXR-L4T-R カメ型・ローバー型 Ver.2(アカデミックパック)
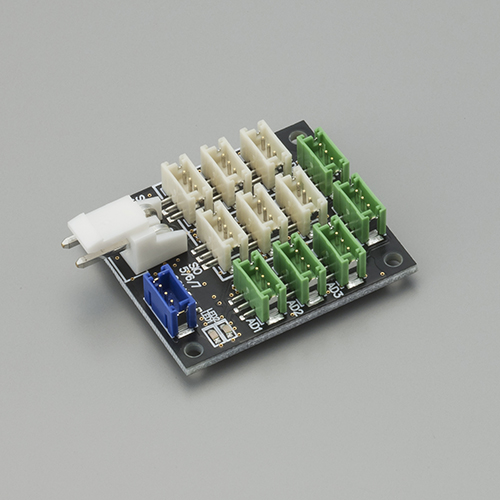
このカメ型ロボットのセットには、KXRプログラミング学習用シールドセット(Arduino用)が付属します。このシールドを使用することでArduino Uno R3から弊社製シリアルサーボやロボットのコントロールボード(RCB-4mini)に直接命令を送ることができます。また、距離を計測できるPSDセンサーも付属します。サーボやコントロールボードと通信するためのライブラリ、サンプルプログラムも無料で公開しています!プログラミングにチャレンジしてみたい方にもお勧めです!(Arduino UNOのみ別売りです)
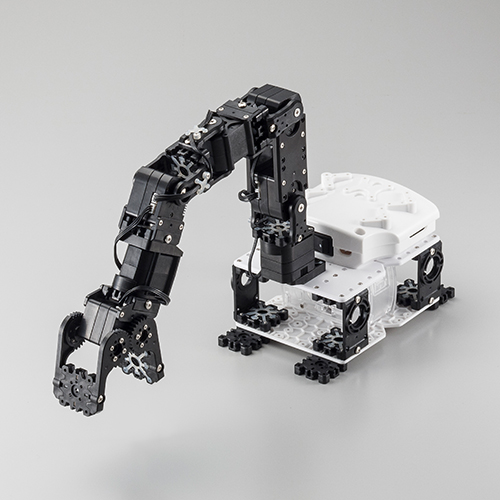
KXR-A5 アーム型 Ver.2
KXR-A5 アーム型 Ver.2は、ハンドを含めて5個のサーボが搭載されています。フレームの一部にダミーサーボを使用していますので、KRS-3300シリーズのサーボとそのまま交換し軸を追加することができます。キットは5軸ですが、最大7軸まで増設可能です。さらに、パーツとサーボの組み換えや追加によって可動軸を自由に変更できます。
基本的な用語と技術について
さて、KXRロボットキットの世界を知っていただく際に、いくつかのご存じない言葉があると思います。その中でも、是非知っておいていただきたい用語を2つだけ、簡単に解説しましょう。
サーボモーター

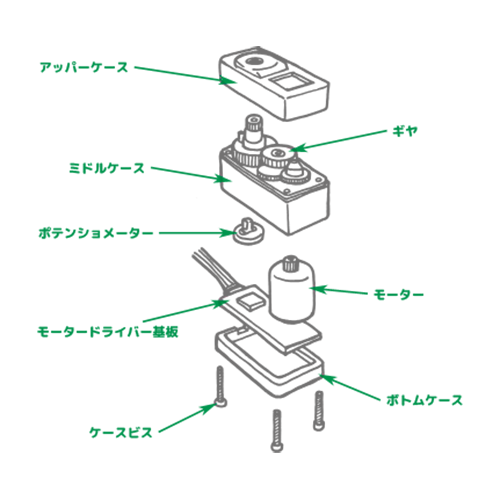
「モーター」といえば、ご存じの通り電気で回転する動力ですが、サーボモーターは電気信号を受け取ることで指定した角度まで動く能力を持った動力源です。ロボットの「関節」となり、思い通りの角度に動かす「筋肉」としての役目を合わせ持っています。
コントロールボード

マイコン(マイクロコンピュータ)を組み込み、他の機器と接続しやすいように整えた基板を「コントロールボード」と呼びます。記憶したり、計算・判断を行ったりする、ロボットの「頭脳」にあたる部品です。
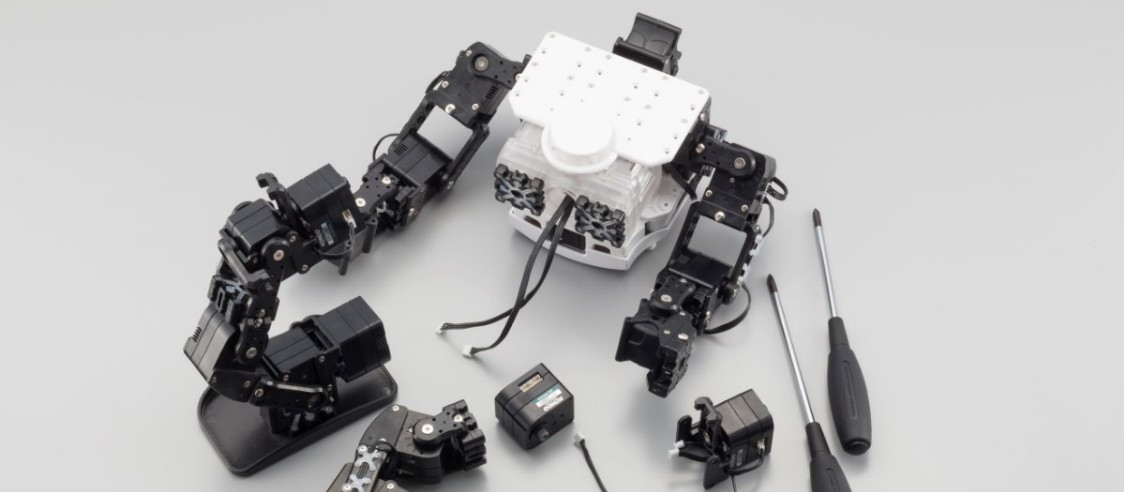
KXRは組み立てキット
そう。KXRシリーズは組み立てキットなのです。
ロボットを組み立てることでロボットの構造を知れば、故障が起きたり調整が必要になった時に自分で対応できます。また、将来的にロボットをカスタマイズするときにも、構造が分かることで作業もしやすく、かつアイデアも湧きやすいのです。より楽しんでいただくための第一歩が、組み立てなのです。
不器用と自認する人でも、「組み立て」と聞いて尻込みする必要はありません。
KXRシリーズの組み立てに必要なのは、模型店やホームセンターで販売されている“普通”の工具とパソコンだけです。
◆プラスドライバー(0番、1番)

0番、1番というのは、ドライバーの先の大きさです。サイズの合ったドライバーを使用することで、適正な力でビスを破損することなくしめることができます。
◆ニッパー
樹脂パーツを切り離すときや、結束バンドを切断するときに使用します。プラモデルを作る方はお持ちかもしれません。刃の部分が薄いものを使用すると便利です。
◆ハサミ・カッター
デカールを切り取るときに使用します。
◆PC
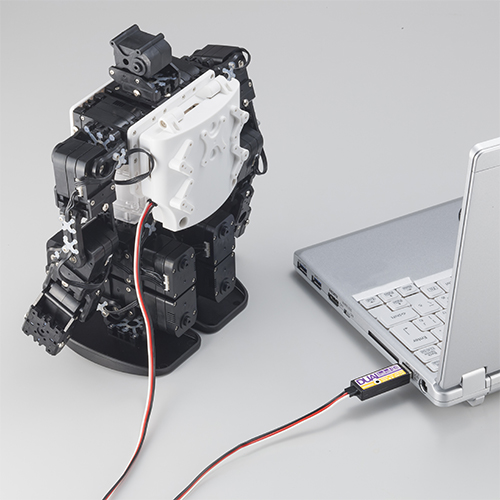
パソコンは、ロボット製作には必須です。また、完成したあとにロボットの動きを作ったり、操作するためにも必要になります。Microsoft Windows(R)7以降のOSが動作し、USBポートが1つ以上搭載されているパソコンが必要になります。ノートPCが理想的です。
また、マニュアルやソフトウェアはダウンロードにて提供しています。ネットにつながる環境でご利用ください。
「KXRシリーズ Download set(取扱説明書・ソフトウェア) Ver.2」
組み立ては精度良く作られた部品をはめ合わせ、ねじで固定していくだけで完成します。配線作業もコネクターを繋ぐだけのワンタッチ。もしあなたにR/Cカーを組み立てた経験があれば、よりスムーズに組み立てられるはずです。
ロボットが完成したら……? そこからが、本当のロボットの楽しみです!
☆「モーション」を作って世界で1つのロボットに!
KXRは組み立てたら終わり、ではありません。組み立ててからが、本当の楽しみです。ロボットは動かすことで、何十倍も魅力的な存在になるのです!
「歩行」や「あいさつ」といったロボットの「動き」は『モーション』と呼ばれます。
モーションはプログラムとしてコントロールボードに記憶されています。キットに付属している専用ソフトウェア「HeartToHeart4」を使用すれば、マウス操作でクリックしていくだけでコントロールボードに記憶させたり、新たなモーションを作ることができます。
といってもイメージしづらいと思いますので、ここで「HeartToHeart4」を使用したモーション作成画面をご紹介しましょう。

モーションはロボットの「ポーズ」を複数つなげることで「動き」になります。画面の中で囲まれている部分に、一つ一つの「ポーズ」があり、これをマウスでクリックしながらつなげていくことで、1つのモーションになります。
KXRシリーズには、先ほど上げたような「歩行」や「あいさつ」といった基本的な動き(サンプルモーション)が付属しています。ですから、組み立てた直後でもロボットを動かすことはできますが、オリジナルの動きを作れば、ロボットへの愛着も強くなるでしょう。1から作るのは難しくても、サンプルモーションをベースに編集して一工夫するだけで、あなたのロボットにしかできない、オリジナルのモーションになります。
そして、「HeartToHeart4」には、独自の「教示機能」があります。これはモーションの中の「ポーズ」を、人形にポーズをつけるように直接ロボットを動かして作り、そのままプログラムの中にデータとして取り込むことができる機能です。通常「ポーズ」はロボットの各関節の角度を数値で指定して作るのですが、この「教示機能」を使えば、イメージする「ポーズ」をロボットに取らせていくだけで、簡単にモーションを作ることができます。
☆フレームパーツを組み合わせて自由にカスタマイズ!
KRS-3300シリーズのサーボに対して、基本的な取り付け方法はKXRシリーズのフレームで対応できます。二足歩行ロボットの腕に軸を追加したり、多脚ロボットの脚を延長したり、アームロボットの軸構成を変更したり。アイデア次第でロボットはどんどん変化していきます。もちろん、1から自分で設計することもできます。3Dプリンターを利用すれば、カスタマイズの幅はさらに広がります。
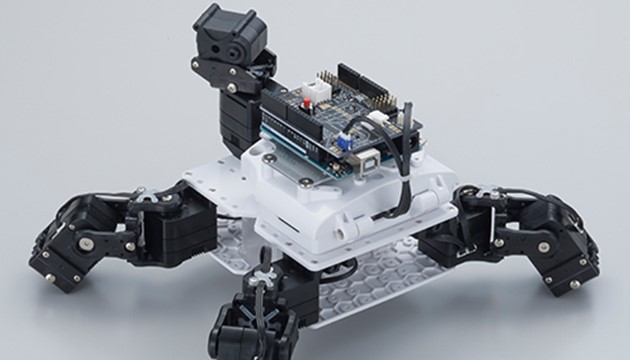
☆Arduinoを搭載してプログラミングに挑戦!
KXRのバックパックにArduino UNOを搭載するためのオプションセットをご用意しました。これを利用すれば、ロボットに登録したコントロールボードのモーションをArduinoからの指示で再生できるようになります。また、サーボに直接角度指示を出して制御することも可能です。Arduinoに対応する多彩なセンサーと組み合わせて、ワンステップ高度なロボットにチャレンジしてみてください!
■「KXR-L4T-R カメ型・ローバー型 Ver.2(アカデミックパック)」
■「KXRプログラミング学習用シールドセット(Arduino用)」
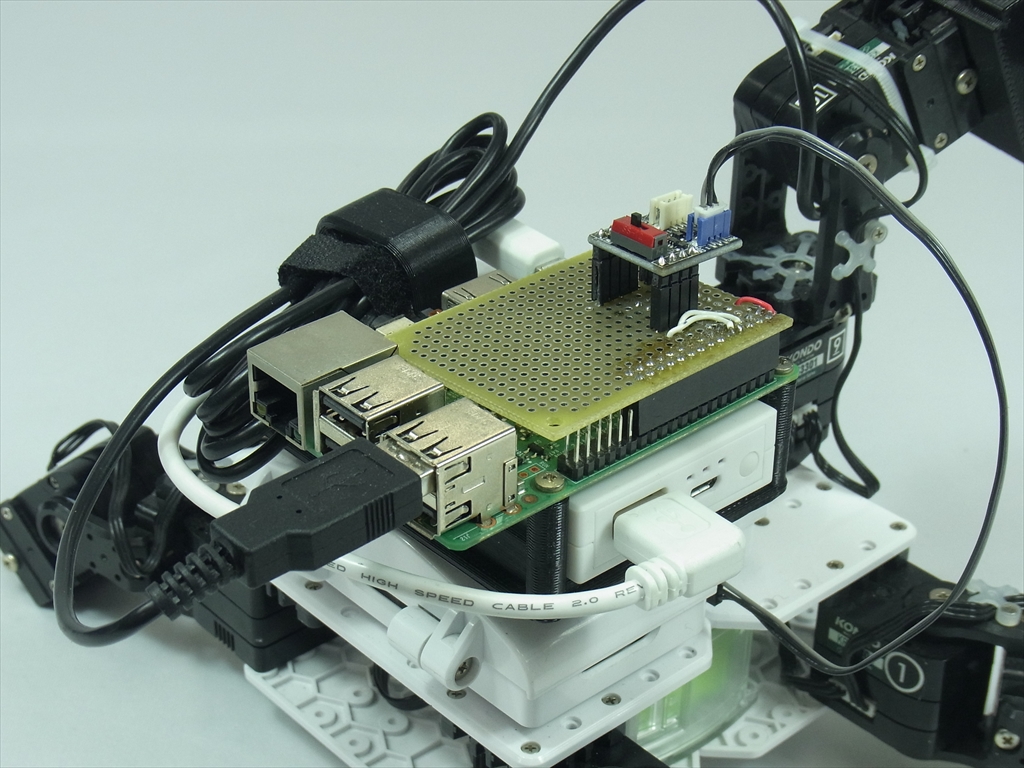
☆RaspberryPiを搭載可能!
Arduinoと同じようにバックパックにRaspberryPiを搭載することができます。Python向けのRCB-4ライブラリも公開していますので、組み合わせれば簡単にRaspberryPiからモーション再生も可能です。
■「RCB-4 Library for Pythonのβ版を公開しました!」
☆イベントに参加しよう!
KXRシリーズの二足歩行ロボットだけが参加できるKXRクラスを開催しています。ルールはシンプルで、KXRのパーツを使用した二足歩行ロボットであればOKです。イベントには個性豊かなロボットたちが参加します。情報交換をして自分のロボットをさらにカスタマイズするアイデアが浮かぶかもしれません。勝ち負けにこだわらずお気軽にご参加ください。
