HeartToHeart4講座(5-2) トリム調整とホームポジション
前回の記事で、プロジェクトを新規に作成し、ロボットに搭載しているサーボを設定するところまで作業しました。今回は、モーションを作成する前の手順として「トリム調整」と「ホームポジション」を準備します。プロジェクトを新規作成する手順は前回の記事で終わらせていますが、HeartToHeart4でロボットを制御するために、トリム調整とホームポジションは重要な内容になりますので、ぜひこちらの記事もお試しください。
【関連記事】
第一章~第四章については下記のページからご参照ください。
第五章
HeartToHeart4講座(5-1) プロジェクトを新規作成する
4.トリムを調整する
前回の記事の続きとして、手順の番号を4からスタートします。手順4は、手順3のプロジェクトを書き込んだ状態から始めます。まずはトリム調整からです。
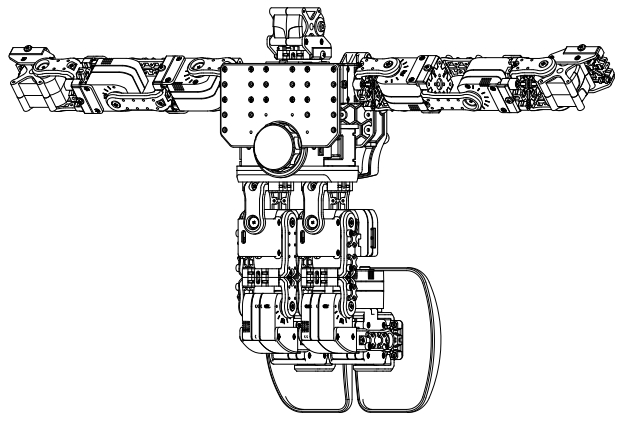
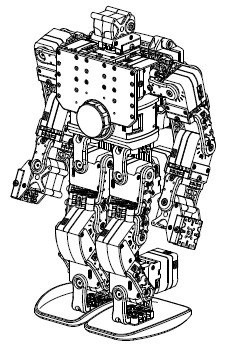
新規に作成したプロジェクトのトリムデータは、すべて0のポジションになっています。このデータのままロボットを起動すると、サーボがすべてポジション0に移動します。例えば、KXR-L2 ヒューマノイド型ですと下記のような状態です。
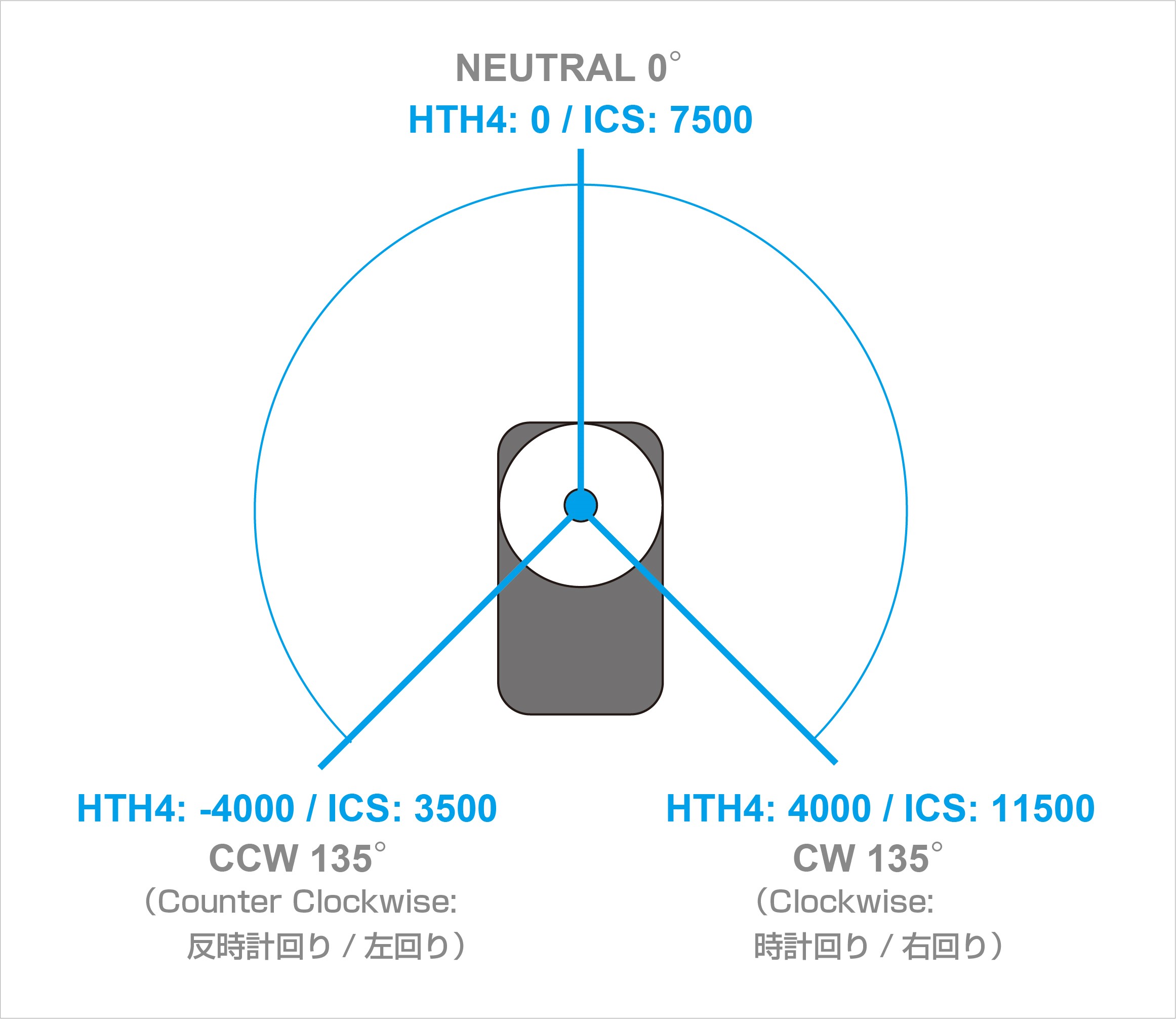
ポジション0とは、サーボの出力軸が左右に動作する真ん中の位置(原点、ニュートラル位置)のことです。
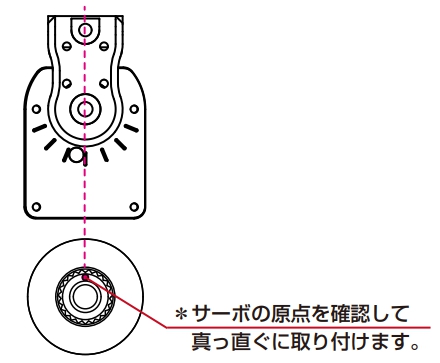
動作角が270度の場合は、この位置から左右に±135度動作します。
全身のサーボがポジション0の姿勢のことを「ニュートラルポジション」とよびます。
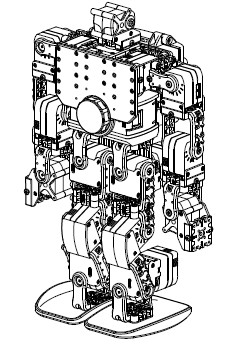
ここから、トリム調整により腕や脚をまっすぐな状態にし、左右のバランスを整えます。KXR-L2ですと下記のような状態です。トリム調整によりまっすぐな姿勢になっている状態を「トリムポジション」とよびます。
この時点で、左右のバランスを可能な限り均等になるように調整することがとても大切です。トリムポジションは、ロボットの基本姿勢になります。また、トリム調整で設定した位置が、モーションを作成するPosコントロール内のスライドバーの0地点になります。トリムポジションでバランスが崩れていると後々のモーション作成でもバランスが崩れた状態で作業することになり、不安定で調整しずらいモーションになってしまいます。トリムポジションは、根気よく丁寧に作業するようにして下さい。
トリムポジションは、ロボットによって異なりますが、なるべく左右のバランスを確認しやすいようにまっすぐに伸ばした姿勢がお勧めです。
トリム調整の具体的な手順は、『HeartToHeart4講座(2-3) トリムを調整する』をご参照ください。
※トリム調整が完了したら一度ロボットの電源をOFFにしてください。次の作業に進む前にバッテリーの充電残量を確認し、充電しておくと安心です。
5.ホームポジションを用意する
トリムポジションの設定が完了したらホームポジションを作成します。ホームポジションとは、モーションの最初と最後にとる姿勢です。モーションの最後をホームポジションで終えることにより、次の動作をホームポジションから始めることができます。これにより、どのモーションをどの順番で再生しても、決められた姿勢から動き始めることができますので、バランスを崩さず安定した動作が可能になります。
KXR-L2のホームポジションは下記のような状態です。動き出しやすいように膝と肘を少し曲げた状態になっています。ホームポジションは、ご自身のロボットに合わせて自由な姿勢に作成してください。
HeartToHeart4には、ホームポジションを設定する個所はありませんので、Posコントロールでホームポジションのポーズを用意し、これをモーションの最後に配置します。
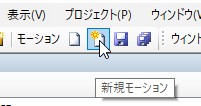
1)「ファイル」メニューにある「新規作成」から「モーション」を選択するか、ツールバーの「モーション新規作成」ボタンをクリックして「モーション編集ウィンドウ」を開きます。
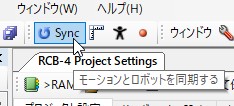
2)ツールバーの「Sync」ボタンをアクティブ(押した状態)にします。
3)ツールボックスからPosコントロールをドラックアンドドロップで一つ置きます。
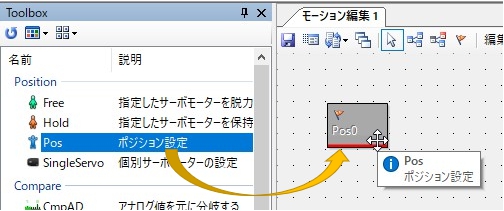
4)先ほど置いたPos0コントロールをダブルクリックで開きます。
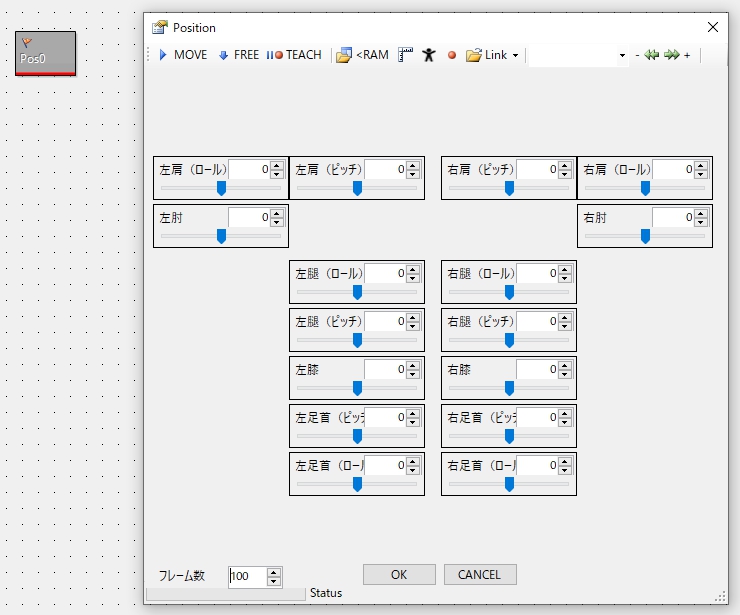
5)ロボットの電源を入れてください。スライドバーを動かすとロボットも連動して動きます。各関節をそれぞれ動かして自由にポーズを作ってください。
ただし、左右の肘、左右のひざなど左右の対称にある関節の値は、同じ値にします(サーボを反対向きに搭載している場合は符号が反転します(右:1000 左:-1000など))。同じ数字にしても左右の関節の位置がバラバラになっている場合は、トリムが合っていません。作業を中断し、トリム調整からやり直しましょう。
また、できるだけ切りの良い数字を指定してください。これは、モーションを作成するときに、どれくらいのポジションを移動するか判断しやすくするためです。
良い例:1000、2500など
悪い例:1254、633など
ホームポジションは、モーションの動き出しですので、どの動きをするときもこのポーズから始まります。ホームポジションは「動きやすく」「安定した」ポーズにしましょう。
6)ポーズが決まったら、PosコントロールのウィンドウをOKボタンで閉じます。
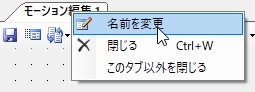
7)モーションの名前を変更します。タブの上で右クリックし「名前を変更」をクリックします。ダイアログが開いたら「ホームポジション」と入力してOKボタンで閉じてください。
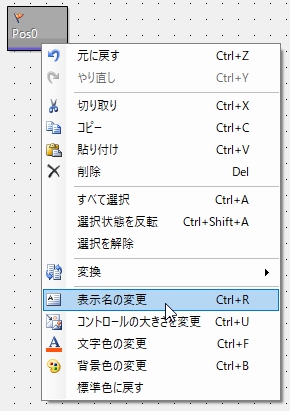
8)コントロール上の表記を「ホーム」に変更します。コントロールを右クリックし、メニューから「表記名の変更」を選択します。ダイアログが開いたら「ホーム」と入力してOKボタンで閉じてください。
変更すると下記のような状態になり、ホームポジションの所在が分かりやすくなります。

8)モーションを保存します。ツールバーの「モーション保存」ボタンをクリックして保存してください。

以上でホームポジションの準備は完了です。ここで作成したホームポジションを各モーションの最後に配置することで、どのモーションを再生しても最後にホームポジションで終わることができます。モーション作成時に活用してください。
次回はスタートアップモーションについて解説します。
KHR-3HV Ver.3.1 リフェバッテリー付きセットの詳細をみる