HeartToHeart4講座(5-3) スタートアップモーション
前回の記事に引き続き、プロジェクトを新規作成したときの手順について解説します。今回はスタートアップモーションについてです。
【関連記事】
第一章~第四章については下記のページからご参照ください。
第五章
HeartToHeart4講座(5-1) プロジェクトを新規作成する
HeartToHeart4講座(5-2) トリム調整とホームポジション
6.スタートアップモーションを登録する
ロボットの電源がONになった直後に一度だけ自動で再生するモーションを「スタートアップモーション」とよびます。スタートアップモーションが再生されることで、ロボットをホームポジションにしたり、各関節のパラメータの起動時の値を変更することが可能です。
1)まずは、スタートアップモーションで再生するモーションを作成します。「ファイル」メニューにある「新規作成」から「モーション」を選択するか、ツールバーの「モーション新規作成」ボタンをクリックして「モーション編集ウィンドウ」を開きます。
2)手順5で作成したホームポジションのコントロールをコピー&ペーストでこのモーション内に複製します。

3)モーションの名前を変更します。タブの上で右クリックし「名前を変更」をクリックします。ダイアログが開いたら「スタートアップモーション」と入力してOKボタンで閉じてください。
4)ロボットの電源を入れてモーションをロボットに書き込みます。モーション作成画面の「モーションの書き込み」ボタンを押します。
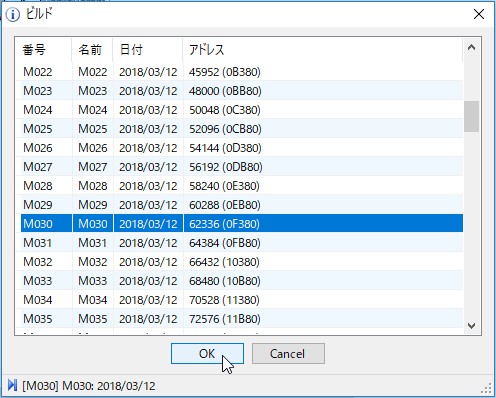
5)ダイアログが開いたら空いている場所を選択してOKボタンを押します。スタートアップモーションは修正する機会が少ないので、M30など下の方に登録しておくとよく編集をするモーションに対して邪魔になりませんのでお勧めです。OKボタンを押すとロボットにモーションデータが書き込まれます。
6)ツールバーの「モーション保存」ボタンで保存し、×ボタンでモーションを閉じます。

7)「プロジェクトウィンドウ」ボタンで「プロジェクト設定ウィンドウ」を開きます。

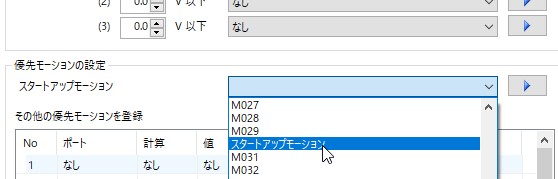
8)「プロジェクト設定」タブに「スタートアップモーション」を選択するプルダウンメニューがあります。ここで先ほど登録した「スタートアップモーション」を選択します。
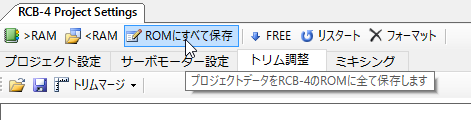
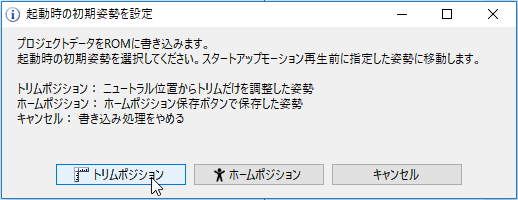
9)同じウィンドウ内の「ROMにすべて保存」ボタンで、プロジェクトを書き込みます。「起動時の初期姿勢を設定」ダイアログが開きますので「トリムポジション」を選択してください。
10)書き込みが完了するとロボットを再起動するか選択がありますので「はい」を選択します。
11)ロボットが再起動すると、一度トリムポジションに移動し、次にホームポジションになります。ホームポジションになりましたら設定は完了です。
12)最後に「プロジェクト保存」ボタンでプロジェクトを保存します。
以上でスタートアップモーションの登録は完了です。手順2のときにサーボのストレッチやスピードを変更するServoParamコントロールを配置することで、電源投入後のサーボのパラメータを指定することもできます。KHR-3HVやKXRシリーズなどのサンプルモーション内にもスタートアップモーションがありますので、各モーションデータを参考にアレンジしてみてください。
次回はバッテリーを過放電しないための設定について解説します。特にリチウム系のバッテリーを搭載しているロボットには必須の内容になっていますので、ぜひ次回もご一読ください。
KHR-3HV Ver.3.1 リフェバッテリー付きセットの詳細をみる