KHR-轟雷 機体解説

株式会社壽屋とのコラボレーション企画として作成した『KHR-轟雷』をご紹介します。
こちらのロボットは東京ホビーショー2016にて展示されましたので、すでにご覧いただいた方もいらっしゃるかと思います。
KHR-3HV Ver.2をほぼそのまま本体に使用し、外装を取り付けるために数か所のフレームを変更しました。
外装の設計、制作は壽屋様にて行い、近藤科学はロボットの調整とモーション作成を行いました。
新規フレームについては、壽屋様に設計をお願いし、ROBOSPOTのマシンにて切削しました。
壽屋様のブログでは、作成の様子がご覧いただけます。
『壽!プラモLABO 「近藤科学×コトブキヤ」企業コラボプロジェクト、始動!』
また、コレボレーション企画の詳細についてはロボコンマガジン様に取材していただきましたので、12月発売のロボコンマガジンをぜひご覧ください!
■本体スペック
・全長:418mm
・重量:2164g(外装付き本体のみ(キャノン含む))
2332g(バッテリー内蔵、マシンガン(45g)×2装備)
(KHR-3HVは、約1500g)
・素体:KHR-3HV Ver.2
・サーボ:17個
KRS-2552RHV ICS ×7個
KRS-2572HV ICS ×10個
・ボード:RCB-4HV
・バッテリー:ROBOパワーセルF3-850
・無線機:KRC-5FH
・センサー:ジャイロセンサーKRG-4 ×2個




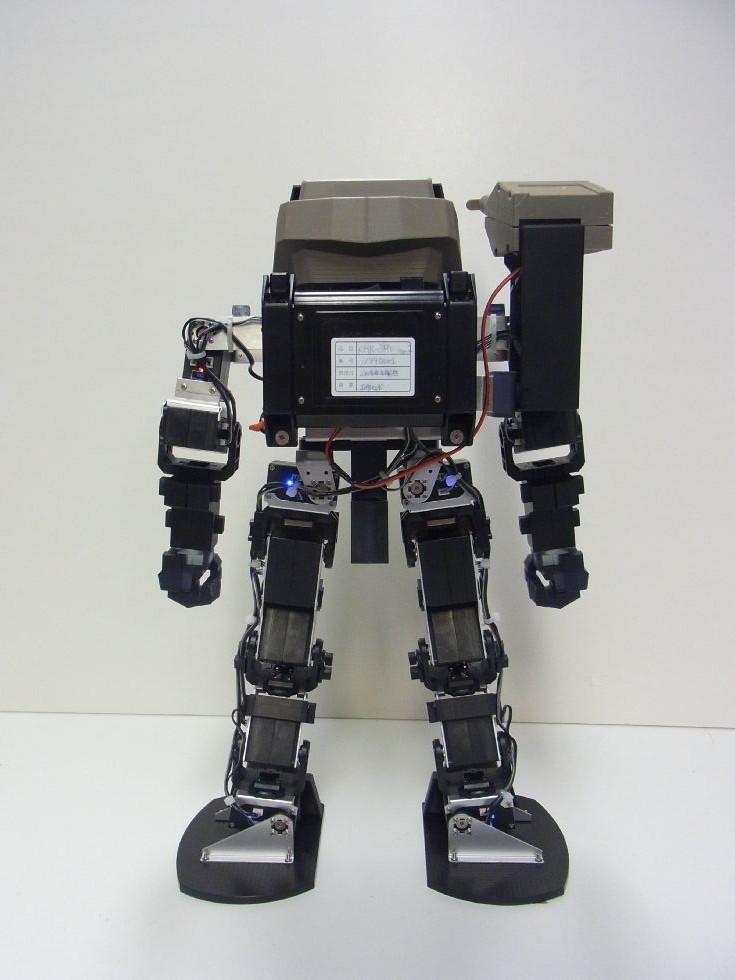
■外装を外した状態




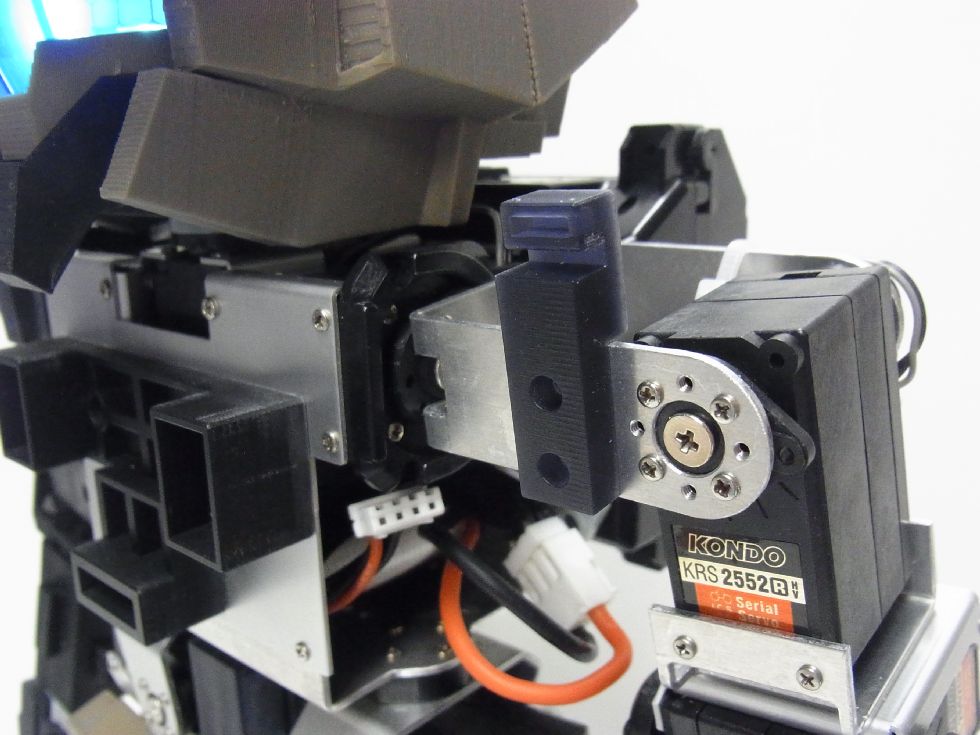
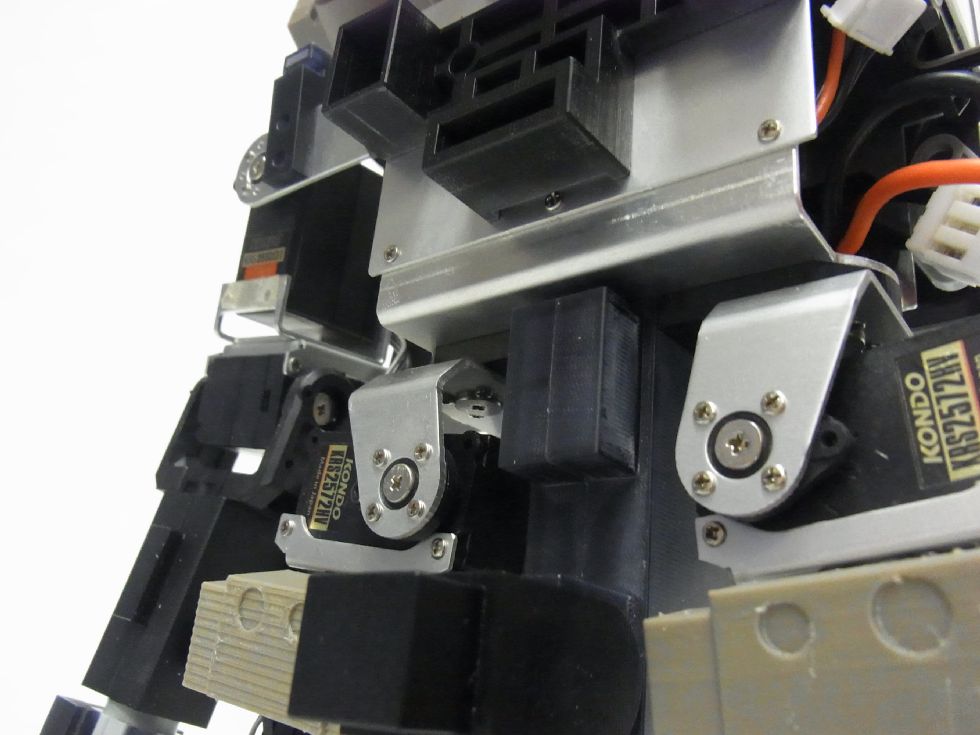
■肩部のフレーム
大きめの肩パーツを取り付けるために、肩フレームを延長する必要がありました。こちらを板金で新規作成し、胴体との間隔を広くとれるようにしました。
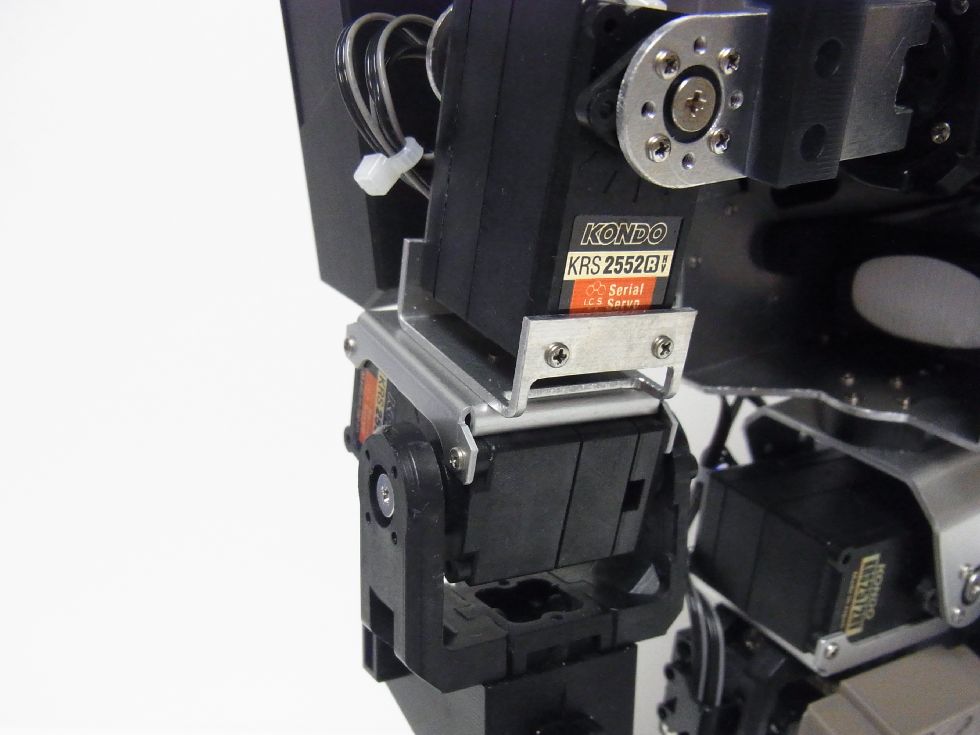
■腕部のフレーム
外装を取り付ける際に肘のダミーサーボが干渉するため、腕部の構造を変更し、接続部のフレームを新規に設計しました。
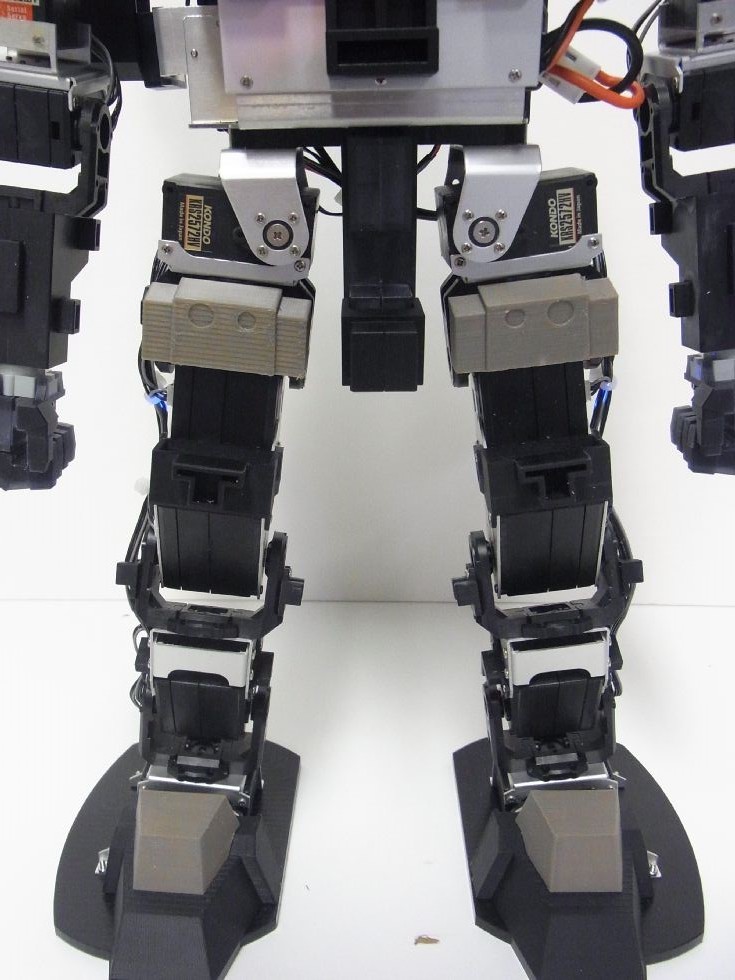
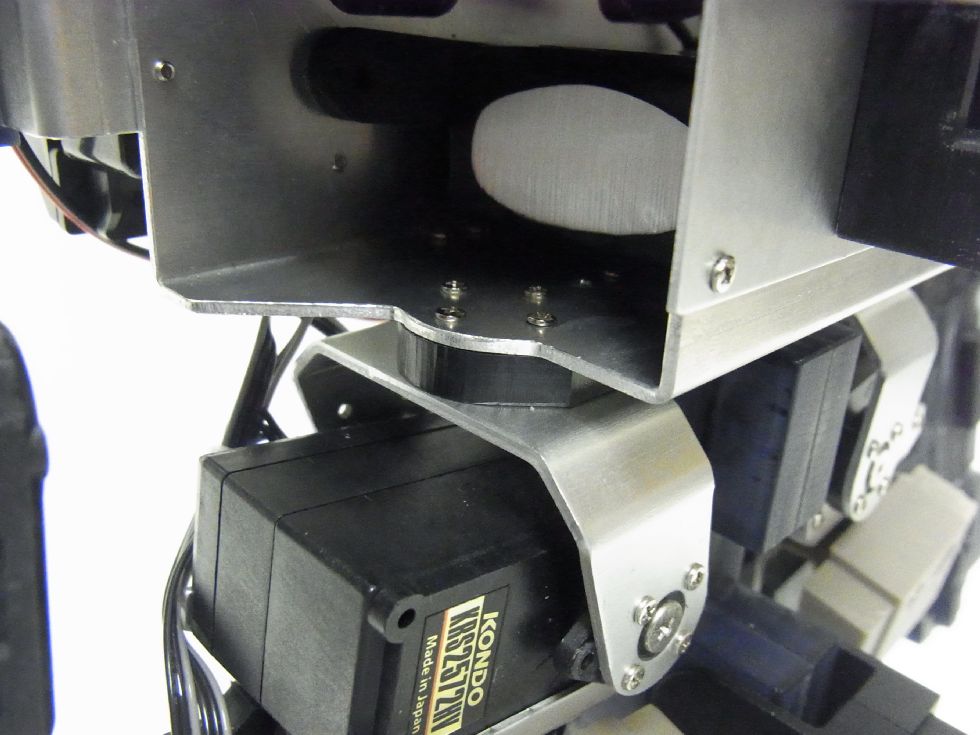
■腰部のフレーム
脚部に外装を取り付ける際に、KHR-3HVのままでは両足の隙間が狭く脚部内側の外装が干渉してしまうため、腰の接続部を左右にずらして間隔を開けました。外装を付けた時に自然になるように、腰部分のダミーサーボケースを外すことで胴体を短くしました。
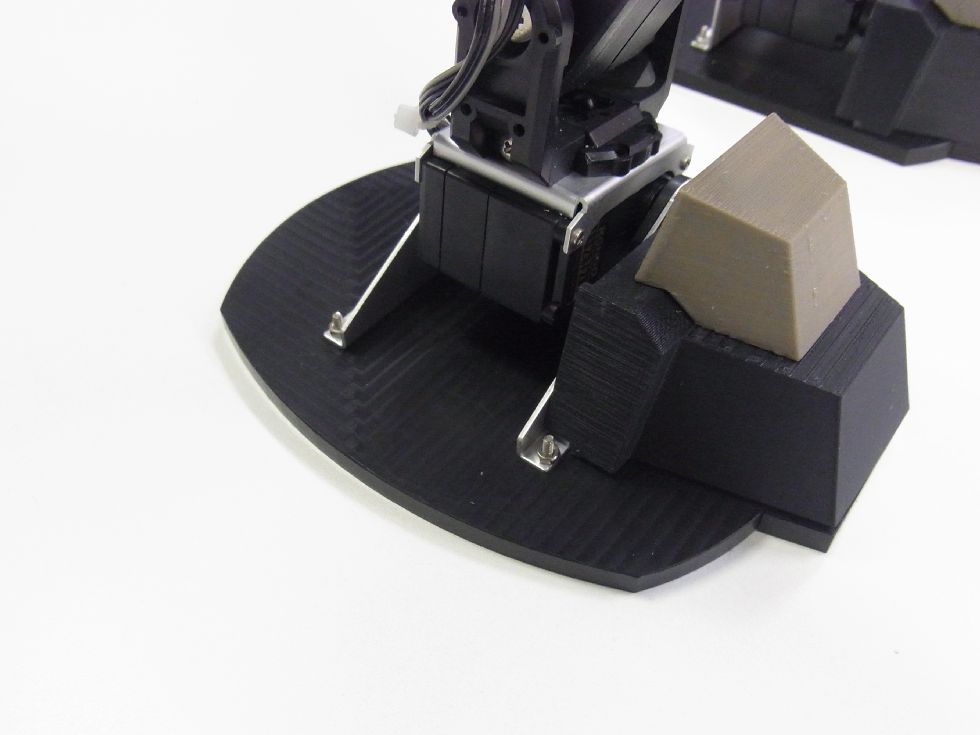
■ソールパーツ
ソールパーツに外装を取り付けるためにABSから削り出しを行いました。
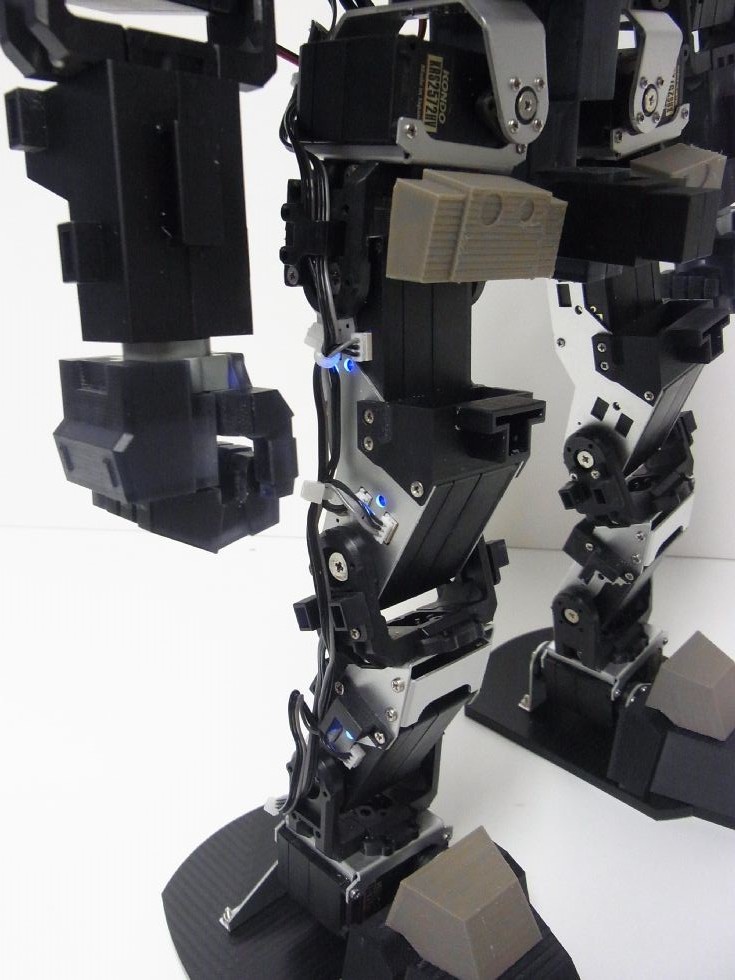
■サーボを強化
外装による重量増に対応するため、脚部のサーボ10個を全てKRS-2572HVに変更し、トルクをアップしました。これにより、外装なしの状態と変わらない安定した歩行が可能になりました。フレーム、ケーブルの変更なく、キットのままサーボの交換が行えました。
また、KHR-3HVと同じくジャイロを2個搭載し、歩行の自動補正を行っています。
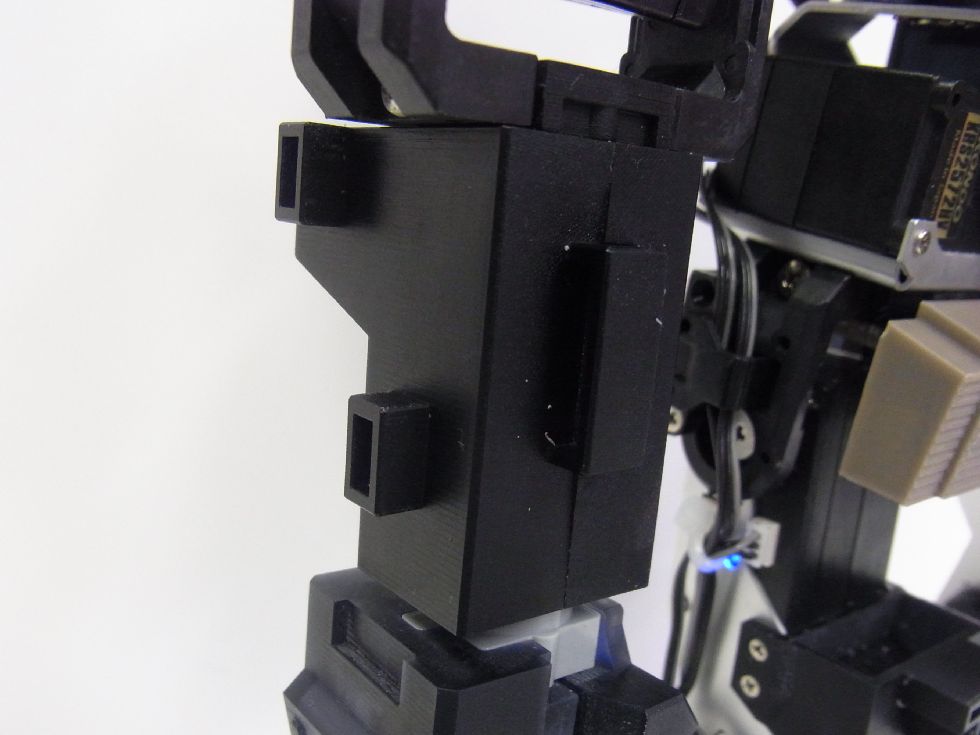
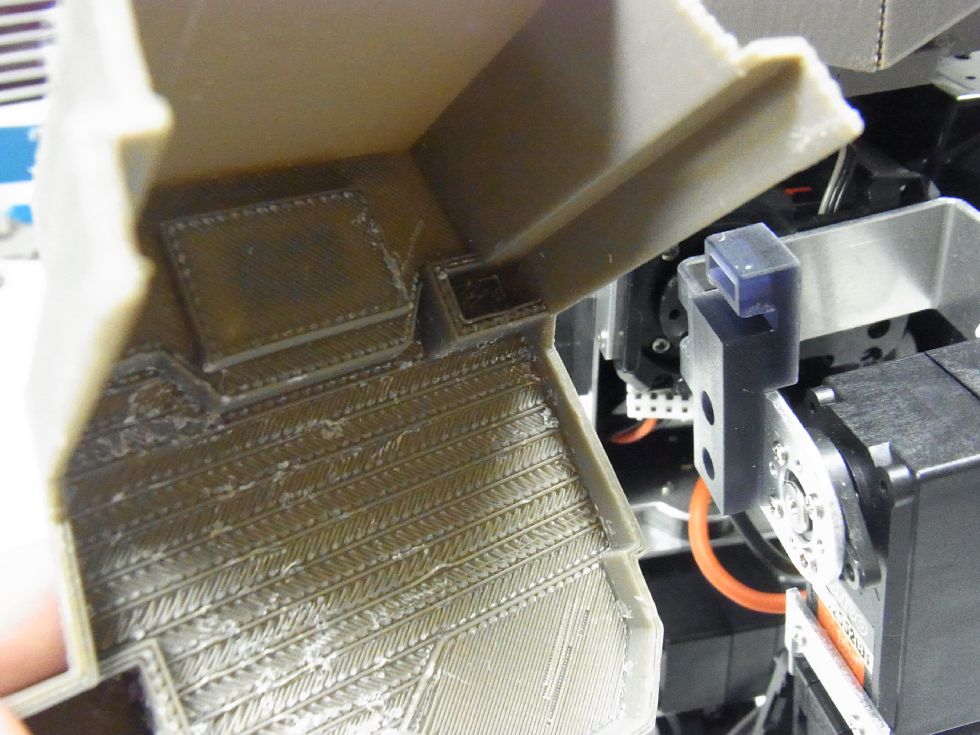
■外装と本体の接続
KHR本体に固定パーツを取り付け、そこに外装を接続しています。外装は取り外しが可能となっており、メンテナンスも非常に簡単に行えました。パーツは全て3Dプリンタで出力しています。外装はプラモデルと変わらない中空パーツで軽量化しています。3Dプリンタは、黒い取り付けパーツ、外装パーツで2機種を使い分けています。

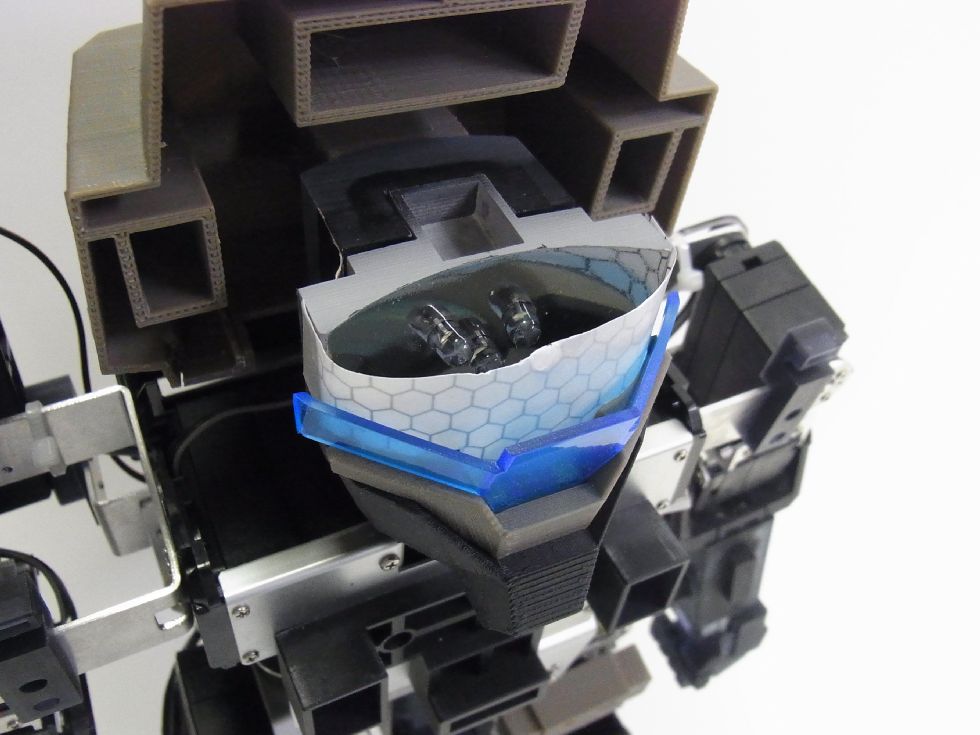
■LEDを内蔵
頭部と肩のキャノンにLEDを内蔵し、モーションによって点滅の制御を行いました。頭部のLEDは、バッテリーの残量により消灯するようになっています。

■モーション
なるべく膝を曲げない自然な人の歩行を目指して作成しました。また、ロボットのカッコよさを活かして射撃モーションを複数作成しました。一部の射撃モーションは、無線コントローラのボタンを押し続けることで連射できるようになっています。こちらはすべてHeartToHeart4にて作成しました。
■無線操作について
無線操作は、KRC-5FHにて行いました。

【KXR-轟雷 動作デモ動画】
KHR-3HVは、設計段階から外装の取り付けを想定して手足を長く細めに設計しています。この度は壽屋様からのご提案により、念願かなってすばらしい外装にてお披露目できましたことを心より感謝申し上げます。ありがとうございました。