ヒューマノイド型
加速度センサーを搭載する

KXR-L2 ヒューマノイド型は、加速度センサーを搭載することで転倒した際の姿勢を検知することができ、自動で起き上がり判定ができるようになります。今回は、加速度センサーの搭載と設定の方法をご紹介します。
■必要なパーツ
■ジャイロの効果
■搭載方法
■設定方法
ジャイロセンサーを搭載する

KXR-L2 ヒューマノイド型は、ジャイロセンサーを搭載することでより安定した歩行ができるようになります。今回は、付属のサンプルプロジェクトを使用してジャイロセンサーの搭載と設定の方法をご紹介します。
■必要なパーツ
■ジャイロの効果
■搭載方法
■設定方法
組立ポイント バッテリーボックス

今回は、バッテリーボックスの組み立てについてご紹介します。
バッテリーボックスは、KXR共通で使用しているパーツで、ボディープレートやバックパックセットと組み合わせて使用することで簡単にロボットのボディーを構成することが可能です。
レッグプレートを組み付けることで、ジョイントベースを装着することが可能になり、二足歩行ロボットなどの脚部を接続できるようになります。
ハッチ開閉式で簡単にバッテリーを交換でき、バッテリーはROBOパワーセル Eタイプ(ニッケル水素バッテリー)とF2-850(リチウムフェライトバッテリー)が搭載可能です。
組立ポイント セレーションとニュートラル

今回の組立ポイントは、サーボのセレーションとニュートラルについてご紹介します。組みあがったロボットが正常に動作するためは、サーボとパーツが正しく接続されている必要があります。非常に重要なポイントですのでぜひご一読ください!
■ニュートラルとは
■セレーションへのパーツの取り付け
■組み立て途中でニュートラルがずれてしまったら

組立ポイント ジョイントベース
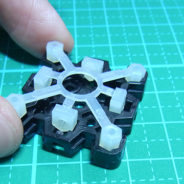
今回から、数回に分けてKXRの組み立てのポイントをご紹介します。
初回は、ジョイントベースとナットです!
ヒューマノイド型のみならずカメ型など他のキットも同じパーツを使用していますので、ぜひ参考にしてください。
■ジョイントベースにナットを取り付ける
■M2.6ナット部を切る場合
■M2ナット部を切る場合