マイコンボード関連記事まとめ
Arduinoなどマイコンボード関連の記事が増えてきましたので、このページにまとめます。ArduinoやM5Stackは非常に扱いやすく、オプションが豊富に揃っていますのでお勧めです。
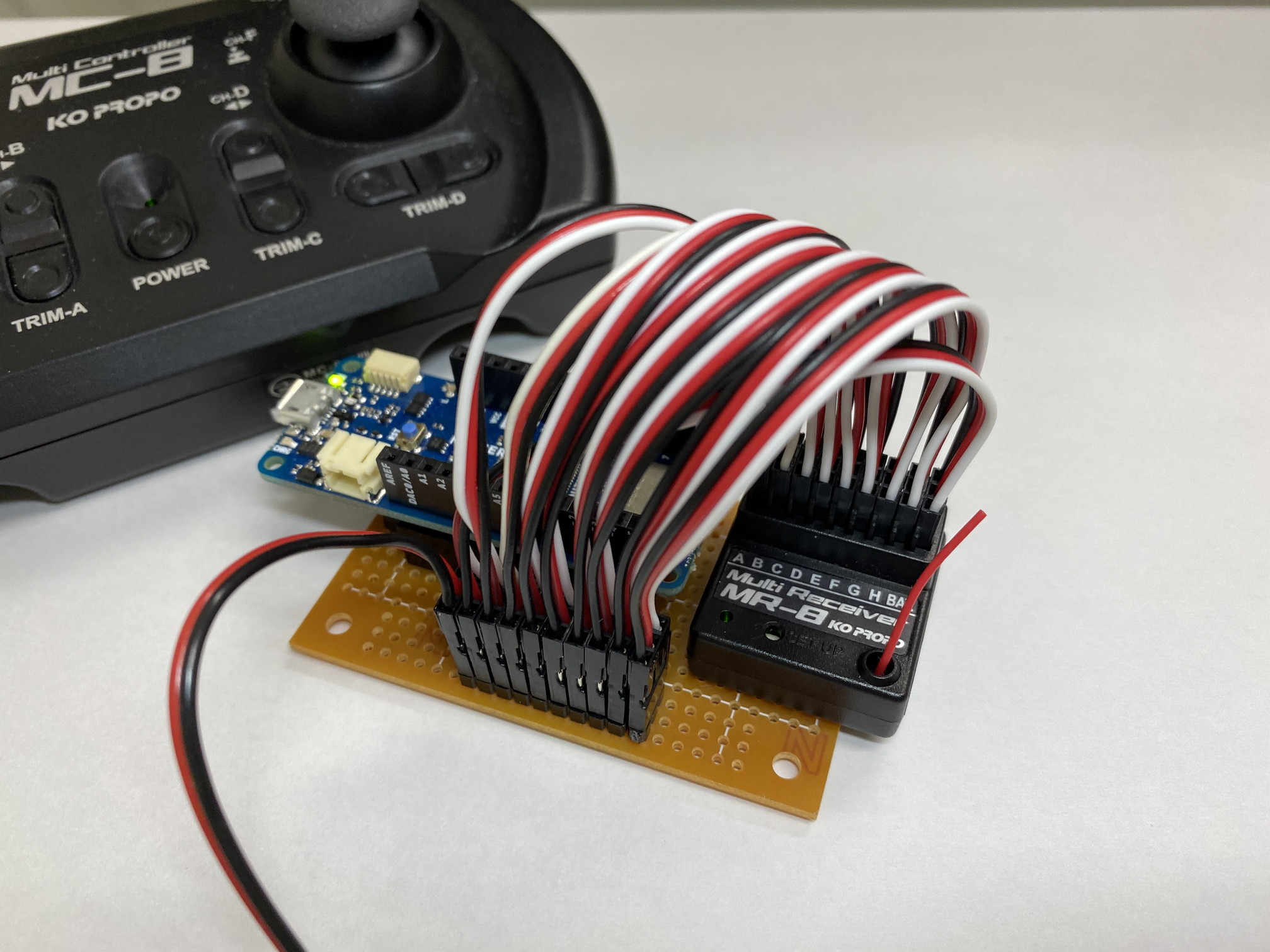
『マルチコントローラーMC-8+MR-8をマイコンボードで使用する』
マルチコントローラーMC-8と対になる受信機MR-8のPWMを、マイコンボードで読み取る方法を解説しています。これにより、MR-8のスティックやボタン操作によりロボットを無線操縦留守ことが可能になります。MC-8は、近藤科学KOPROPOの無線技術により、ゲームコントローラより安定した無線通信が可能です。
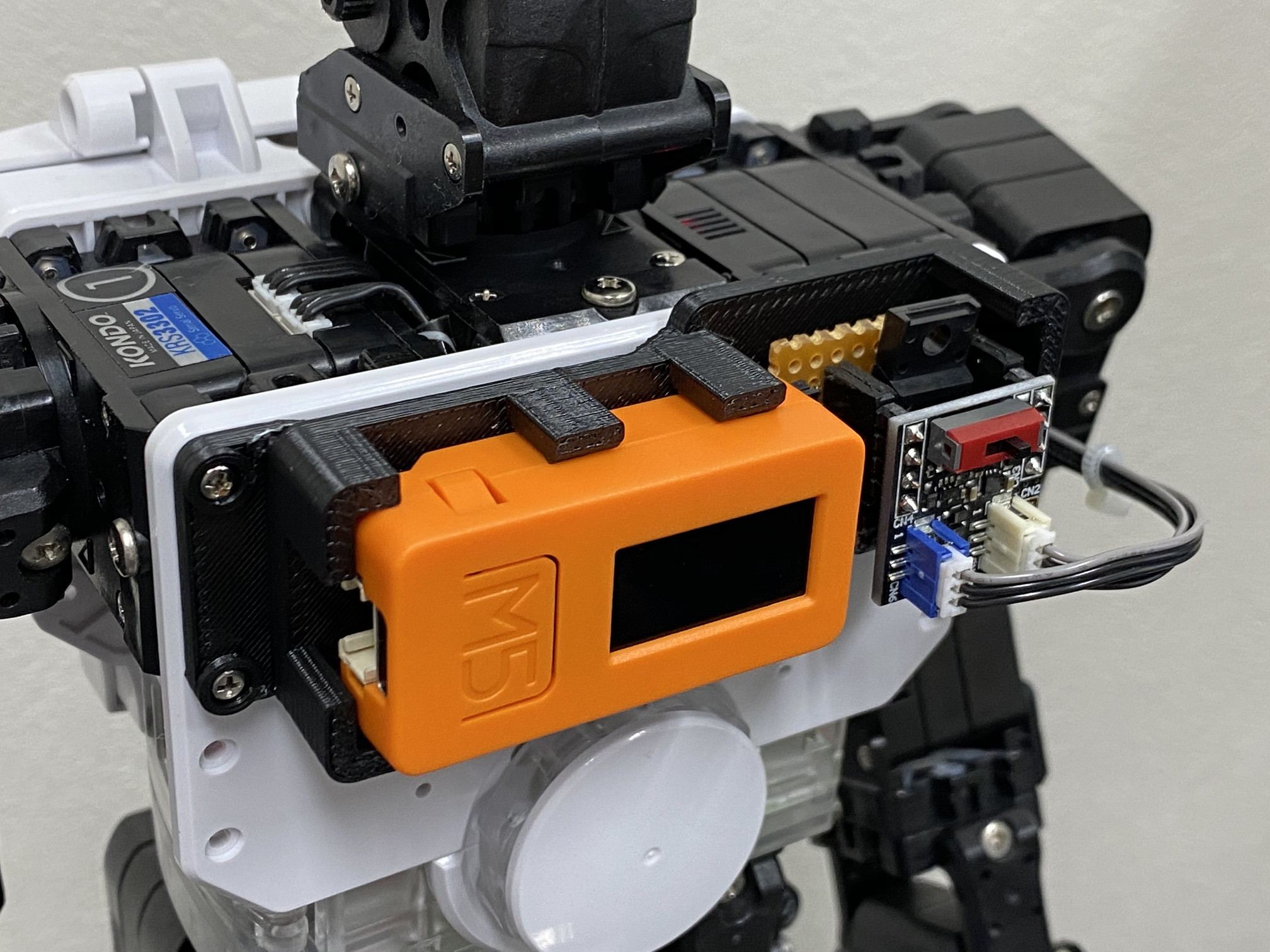
『RCB-4変換基板の使用方法(4) M5StickCからRCB-4のモーションを再生する』
M5Stack社のM5StickCから、ロボットに搭載されているRCB-4のモーションを再生する方法をご紹介しています。コンパクトで高機能なM5StickCと組み合わせることで、ArduinoIDEからのプログラミングや、市販の対応するセンサをロボットに搭載することが可能になります。また、Wi-FiやBluetoothも搭載していますので、ロボットの無線化も可能です。
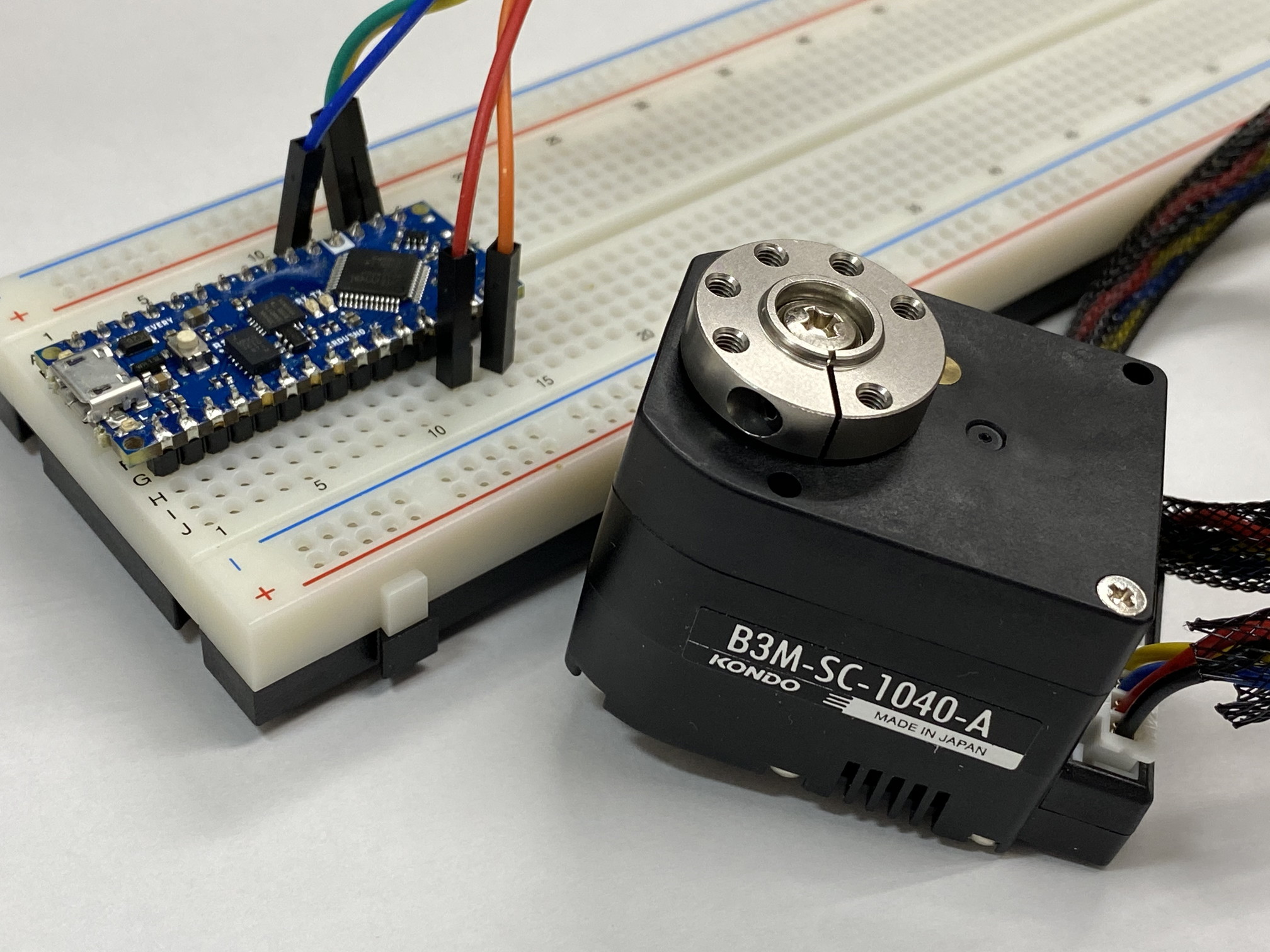
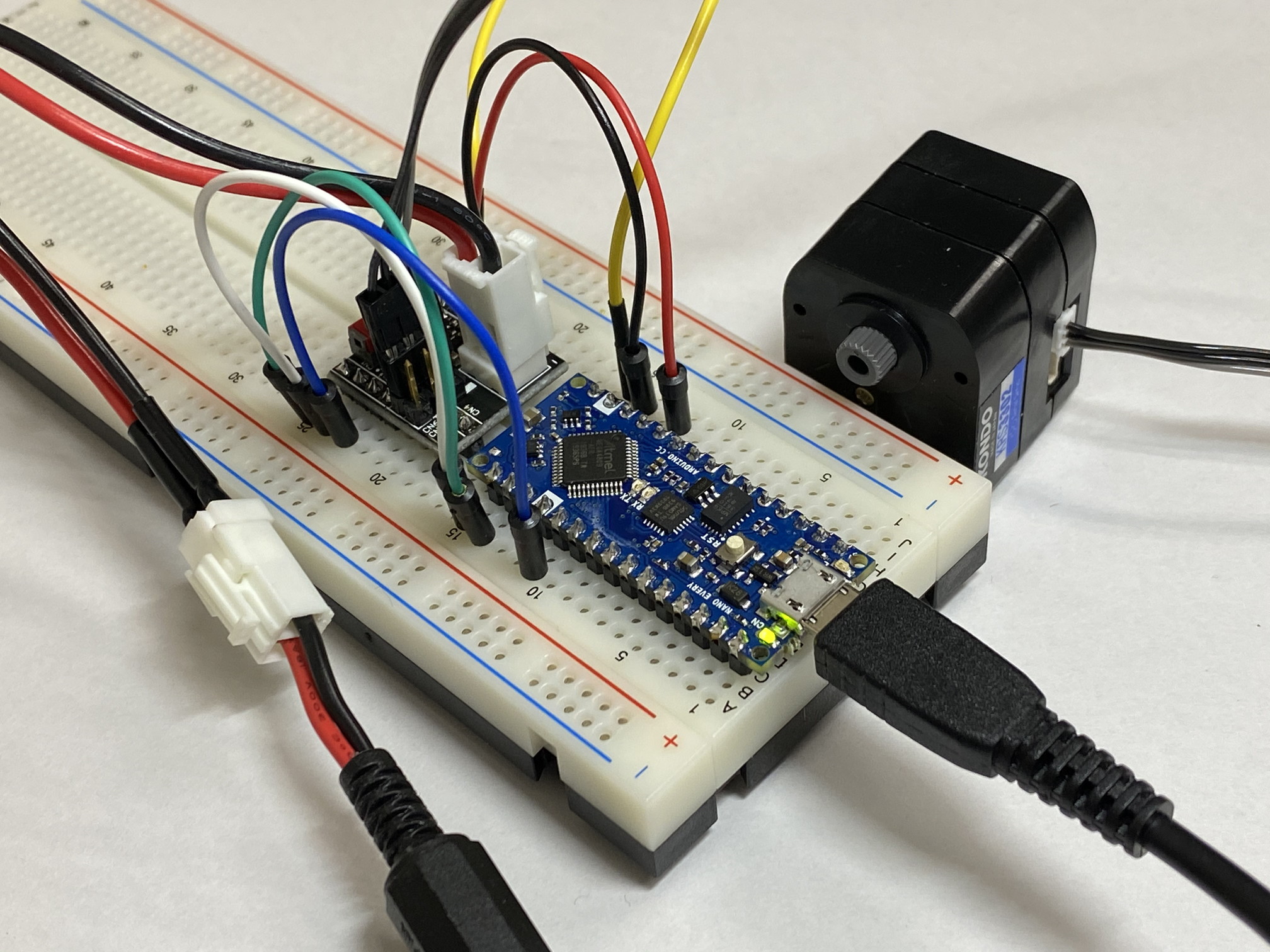
『B3Mサーボモータを動かそう(Arduino制御編)』
Arduino Nano EveryからB3Mサーボを制御する方法をご紹介しています。B3Mサーボは、6種類のコマンドで制御できます。この記事では、設定を変えるWriteコマンド、サーボのポジションを指定するPositionコマンドについて解説していますが、内容を少し変更するだけで他4種類のコマンドを作ることができます。
『ICS変換基板の使用方法(6-3) Arduino MEGAからKXR-L6の歩行制御』
Arduino MEGAからKXR-L6の全身のKRSサーボに角度指示を出し、前進、旋回歩行する方法をご紹介しています。KXR-L6に標準で付属するRCB-4miniとHeartToHeart4は、専用のソフトウェアで簡単にモーションを作成、再生することができますが、Arduinoからプログラムで動かすことでさらに自由度の高い動きを実行することが可能です。
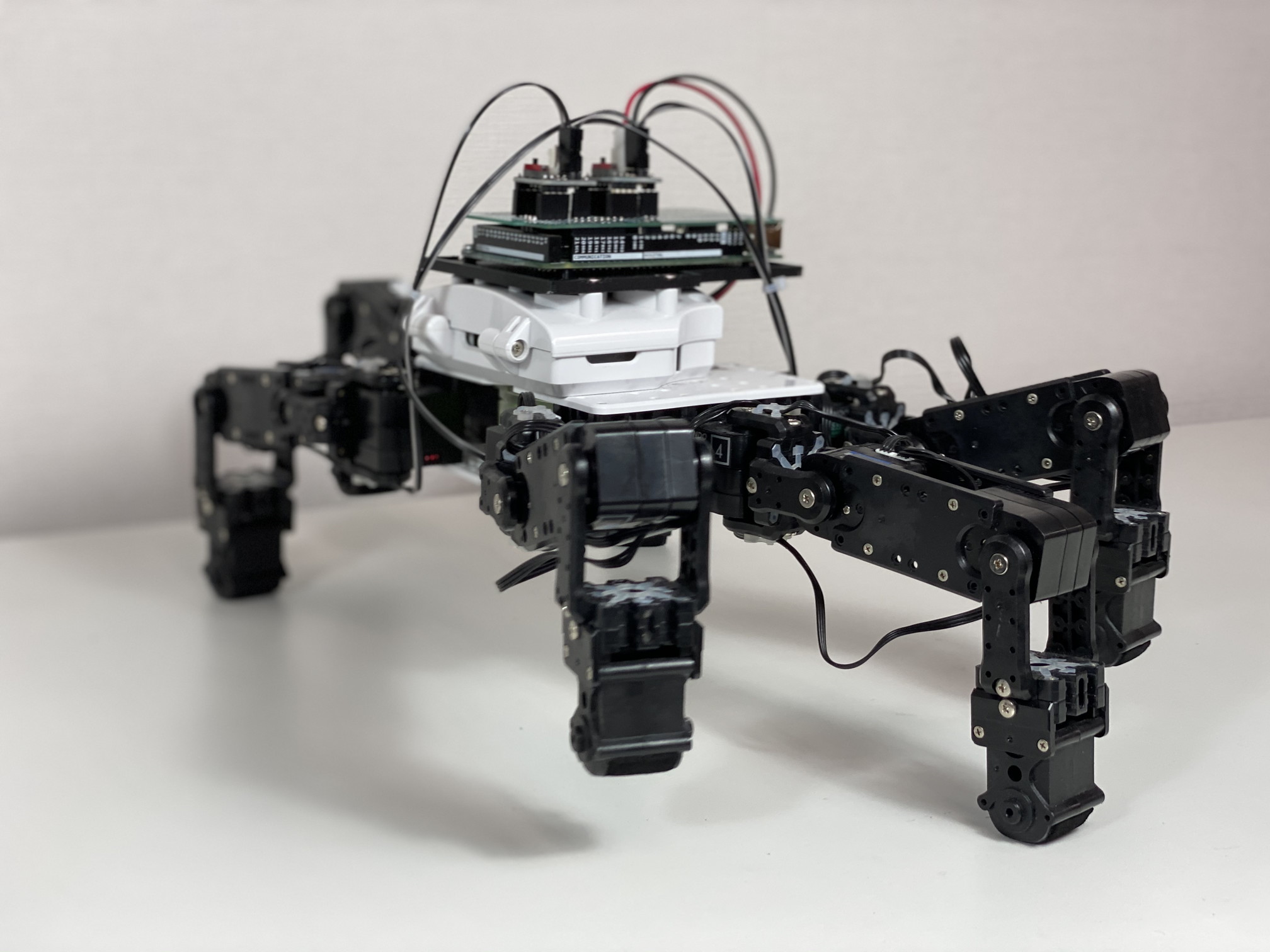
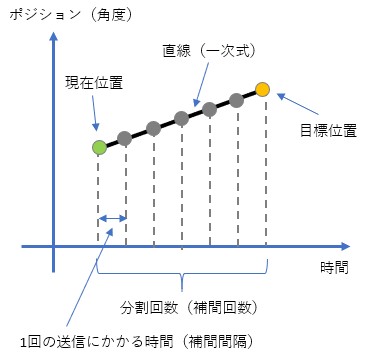
『ICS変換基板の使用方法(6-2) 直線補間でサーボを滑らかに動かす』
簡単な直線補間で、サーボを滑らかに動かす方法の解説です。この記事では、6脚型のロボットを例にしていますが、直線補間の関数内にあるサーボ個数の部分を変更すればどのロボットに対しても利用することができます。
『ICS変換基板の使用方法(6-1) Arduino MEGAで18個のサーボを制御する』
Arduino MEGAは、多数のシリアル端子を装備しています。この記事では、2つのシリアル端子を利用し、18個のサーボを搭載するKXR-L6 6脚型をプログラムで歩行する方法をご紹介しています。今回は、プログラミング前の準備編です。

『ICS変換基板の使用方法(5) Arduino Nano EveryでKRSサーボを制御』
小型で使いやすいArduino Nano EveryからKRSサーボを制御する方法をご紹介しています。Arduino UNOは、シリアル端子がUSBと共用でしたが、Everyは独立して用意されていますので、サーボから取得した方法をPCに送ることができ、非常に便利です。
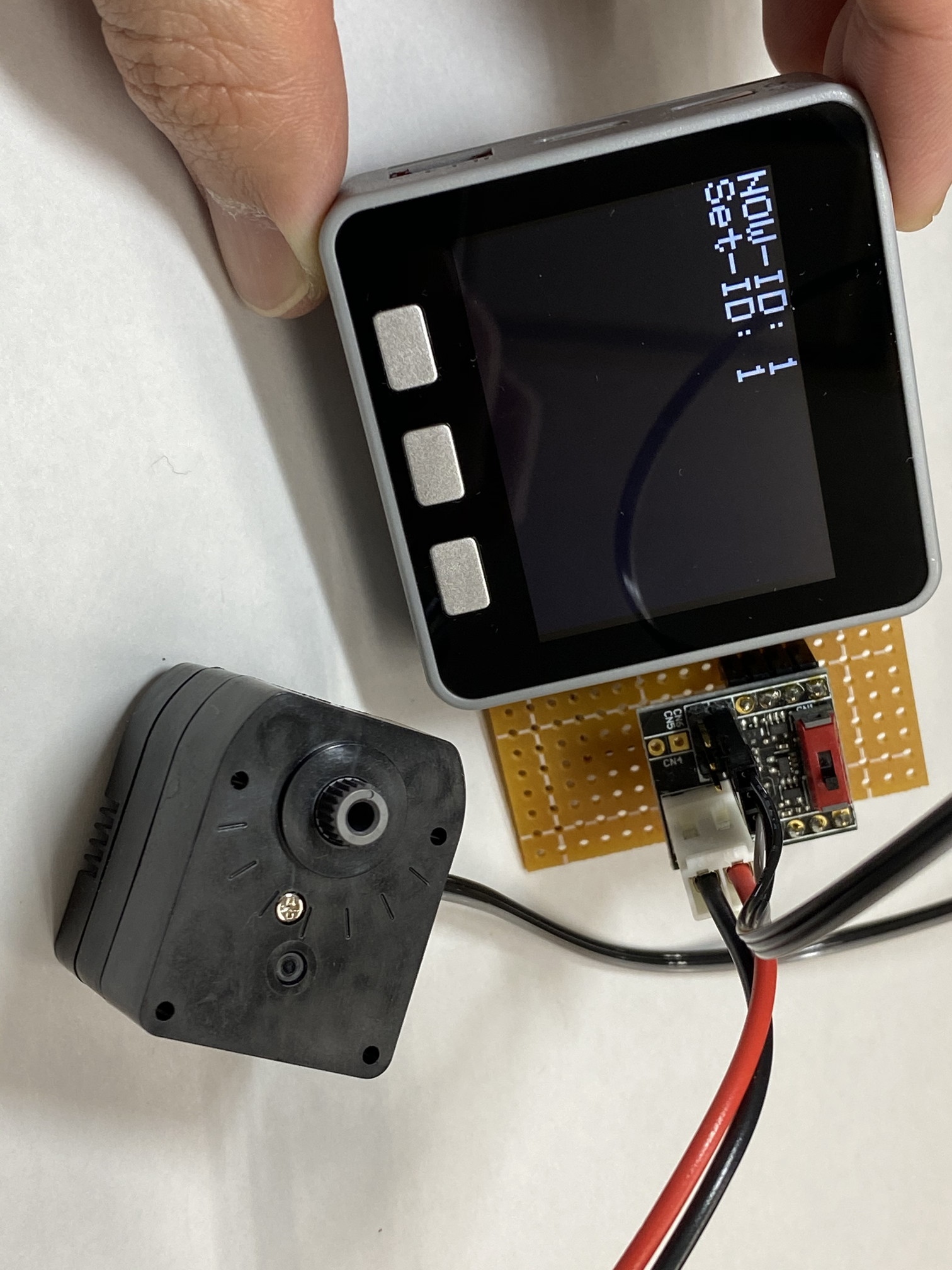
『ICS変換基板の使用方法(4-2) M5StackでID読み書き』
M5Stackから、KRSサーボのIDを変更する方法をご紹介しています。M5Stackは、液晶付きでさらにボタンが3つ付いていますので、サーボマネージャとしても適しています。ICSライブラリで用意されている、setPos関数などサーボを制御する関数も通常通り使用可能です。
『ICS変換基板の使用方法(4) ID読み書き編』
Arduino用ICSライブラリのVer2.1からKRSサーボのIDの読み書き関数が用意されました。ArduinoからIDの書き換えができれば、Dual USBアダプターHSが必要なくなり、導入コストを抑えることができます。ただし、Dual USBアダプターHSは、マネージャソフトと組み合わせてKRSサーボの動作確認用に最適ですので、お手元に1つ用意しておくことをお勧めします。
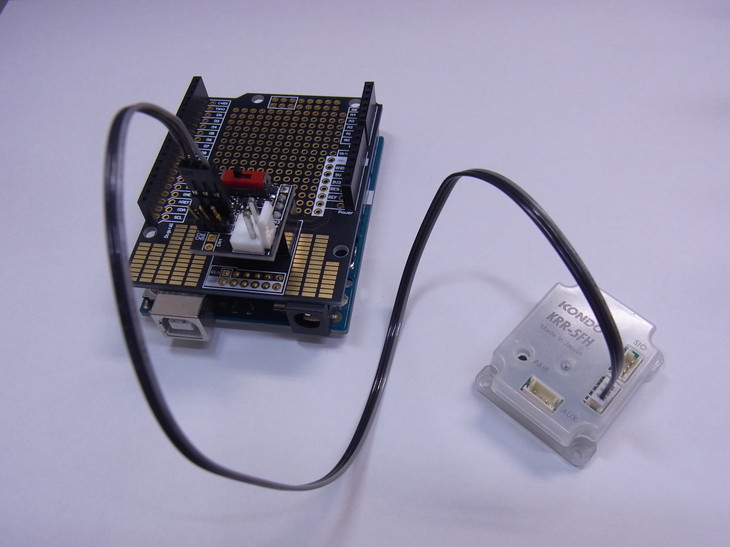
『ICS変換基板の使用方法(3) 無線コントロール編』
ICSライブラリには、受信機KRR-5FHと通信するための関数が用意されています。KRR-5用の関数を利用することで、送信機KRC-5FHからのボタンデータをArduinoで取得できるようになり、簡単に無線操縦することが可能です。
『ICS変換基板の使用方法(2) サーボ制御編』
ICSライブラリのサンプルプログラム「KrsServo1」を例にKRSサーボへ角度指示を出す方法を紹介しています。
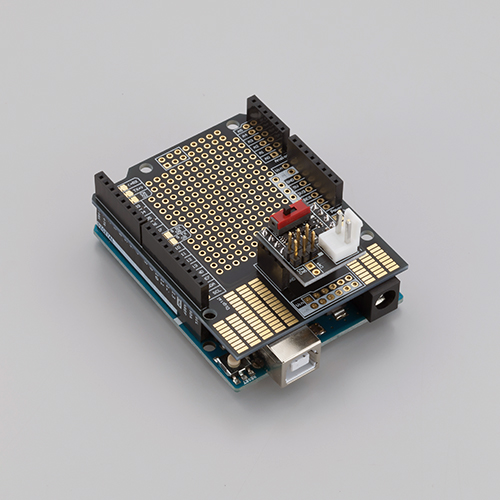
『ICS変換基板の使用方法(1) 準備編』
ICS変換基板とICSライブラリを組み合わせることで、Arduinoから簡単にKRSサーボを制御することが可能になります。この記事では、ICS変換基板の概要と準備について解説しています。ICS反感基板は繰り返し使用しますので、まずはこの記事をご一読ください。