ニュース
KHRシミュレータ公開
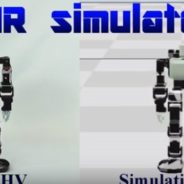
弊社KHR-3HVをシミュレータ上で動かすことができる『KHRシミュレータ』が公開されました。 ※こちらのシミュレータは、近藤科学の製品ではございませんのでお問い合わせにはお答えできません。また、作成元へのサポートにも対応しておりません。予めご了承ください。 二足歩行ロボットKHR-3HV(近藤科学株式会社製)のシミュレータを公開します。Coppelia Robotics社から無償で公開されているV-REP Playerと同時に使うことで、数値計算による物理シミュレーションにより、実機を使わずにKHR-3HVの動作をCG(コンピュータ・グラフィックス)でリアルタイムに確認できます。 KHRシミュレータではKHR-3HVに搭載されているCPUボードRCB4の動作も含めてシミュレートしているので、実機と同じコマンドで制御できるようになっています。そのためサンプルモーションや既存のロボットモーションに手を加えることなく、そのまま実行できます。 また近藤科学社のモーション作成ソフトウェアHeartToHeart4(HTH4)や自作のロボットコントロールプログラムとも、容易に連携できます。シミュレータと実機を自由に切り換えられるので、シミュレータを...
もっと見るマルチコントローラーMC-8 発売!

新商品のマルチコントローラ『MC-8』をご紹介します! MC-8とオプション関連は、2019年8月下旬出荷開始です。 ●MC-8とは MC-8は、PWM信号で制御する機器を8チャンネル制御できるマルチコントローラです。PWM信号で制御するサーボやスピードコントローラを接続することができますので、RCカーの操縦は元より、工作セットや自作ロボットなど、多彩なマシンを無線コントロールすることができます。 操縦方法は、スティック操作が4チャンネル、ボタン操作が4チャンネルです。 MC-8専用の受信機MR-8と組み合わせてご利用できます。 【商品ページ】 MC-8 2.4GHz MX-F 送受信機セット(MR-8付属) MR-8 2.4GHz MX-F(受信機のみ) 【ご注意ください】 本製品は、RCBシリーズを搭載したロボットには対応していません。KHR-3HV、KXRシリーズなどロボットキットにはご利用いただけませんのでご注意ください。 ロボットキットには、KRC-5FHをご利用ください。 ●スピードコントローラMD-1 130サーズから370サイズのDCモータに対応するスピードコ...
もっと見る【CIT Brains】 RoboCup Asia-Pacific2019 ヒューマノイドリーグ優勝
5月16日~18日に天津で開催されたRoboCup Asia-Pacificのヒューマノイドリーグにて、弊社のB3Mサーボをご採用いただいているCIT Brains様が優勝しました! おめでとうございます!! ■RoboCup Asia-Pacific(RCAP)天津大会 http://robocupap.org/index.php/tianjin2019/ ■ロボットの詳細は下記をご参照ください。 https://kondo-robot.com/archives/15775 ...
もっと見るKHR 15thアニバーサリー開催のお知らせ

このイベントは終了しました。たくさんのご参加、ご来場いただきまして誠にありがとうございました! ■リザルト ・KHRクラス<ダウンロード> 【優勝】クロムキッド ・KXRクラス<ダウンロード> 【優勝】ボイジャー 両者とも前回の28回KONDO BATTLEから2連覇!!おめでとうございます!! 2004年にKHR-1が発売されてから今年で15周年になります。これまでご利用いただいたKONDOユーザーの皆様へ感謝の気持ちを込めて、8月25日に15thアニバーサリーイベントを開催します! さらに、KHR-3HVが2009年に発売されてから、なんと10周年!KHR-3HVにとっても記念すべき年となりました! もちろん、KRSサーボ、KXRシリーズのユーザーの皆様にもご参加できるカテゴリーをご用意しております! 15thアニバーサリーイベントにぜひご参加ください! ■イベント概要 日にち:8月25日(日) 内容:クラス別バトルイベント KHRクラス、KXRクラスのバトルイベントを開催します! 会場:3331 Arts Chiyoda コミュニティスペース...
もっと見るKRS-6104FHV 発売のお知らせ

新商品『KRS-6104FHV ICS』の発売が決定しましたのでご案内します! 追記:本製品の出荷を開始しました!ご購入の際はお取扱店様へお問い合わせください。 ★★★発売記念キャンペーン★★★ KRS-6104FHV発売記念キャンペーンと致しまして、数量限定でアルミサーボホーン(Iカット型)をプレゼント! 数に限りがございますので、ご購入はお早めに! ※サーボ1つにつき1個のサーボホーン、ホーン止めビスをプレゼントします。 ※キャンペーンは、予定数に達し次第終了とさせていただきます。 KRS-6104FHV ICS <スペック>(11.1V時) ●最大トルク:70.0kgf・cm(暫定値) ●最高スピード:0.23s/60°(暫定値) ●寸法:54.2 × 37.4 × 39.5 mm(突起部除く) ●重量:113g(本体のみ) ●最大動作角度:270° ●最大消費電流:6.1A ●ギヤ種類:特殊アルミギヤ +ステンレスギヤ ●ケース材質:アルミ(トップ、ミドル) ガラス入り樹脂(ボトム) ●ギヤ比:362.88:1 ●電源電圧:HV仕様(9V~12V) ●通信規格...
もっと見るRCB-4 Library for Pythonのβ版を公開しました!

RaspberryPiなどシングルボードを含むコンピュータから、RCB-4のモーションを再生するためのライブラリを公開しました。このライブラリを使用することで、KHR-3HVやKXRシリーズなどRCB-4を搭載したロボットを外部から手軽に制御できるようになります。 ロボットの制御はRCB-4、画像処理などを外部のコンピュータが担当することで、煩雑なサーボ制御を全てRCB-4に任せ、コンピュータの負担を少なくするメリットがあります。 さらに、HeartToHeart4のミキシング機能やループ機能に関連する便利な関数も多数ご用意しています。 このライブラリはPythonで書かれていますので、Pythonが動作する環境でご利用いただけます。 ※このライブラリはβ版です。環境によってはご利用いただけない場合があります。 ライブラリは下記の記事からダウンロードしてください。 『RCB-4 Library for Python ver.1.0.0B』 モーションの再生方法は二種類あります。 ・モーション番号を指定して再生する(MotionPlay) ・モーションに割り当てられたボタンデータで再生する(SetButton) 各関数を使い分けることによ...
もっと見る