KMR-M6をリモートブレインで動かす(1回目)
◆はじめに
弊社のHeartToHeart4(以降HTH4)では、サーボモータの制御を一括で管理でき、簡単にモーションの作成や編集をすることができ大変便利です。ただし、HTH4で動かすことができるコントロールボードRCB-4HVのみを用い、考えて行動するなどの高度な処理を行うには限界があります。
物を考える部分をPCで行い、動作部分をコントロールボードで行えば、自律のような複雑な動きをすることができます。この方式は、外部に考える部分があることからリモートブレインと呼ばれています。
そこで7回にわたり、リモートブレインでロボットを動かす仕組みを紹介していきます。
◆リモートブレインで何をさせるのか?
最近、家庭用のお掃除ロボットを使っている人が増えてきました。そのお掃除ロボットの特徴は次のようなものがあります。
- 障害物や段差など行くことができないところを検知して回避します。
- 自分の通ったところを憶えておき、掃除していない場所に行こうとします。
弊社ロボットKMR-M6と距離センサを使い、下の①、②ができれば、お掃除ロボットの動きをさせる事ができそうです。
そこで、KMR-M6を用いてお掃除ロボットの動きを再現しようと思います。
①障害物を検知し回避する
RCB-4HVはADポートにアナログのセンサを取り付けることができます。KMR-M6の前方にアナログ式の距離センサを取り付け、ロボット前方の距離を測り障害物を見つけます。
距離センサのデータをいったんPCに送り、このデータをもとにPCが次ロボットをどう動かすか考え、ロボット側に動作コマンドを送ります。
②自分の通過したところがわかるような地図を作成する
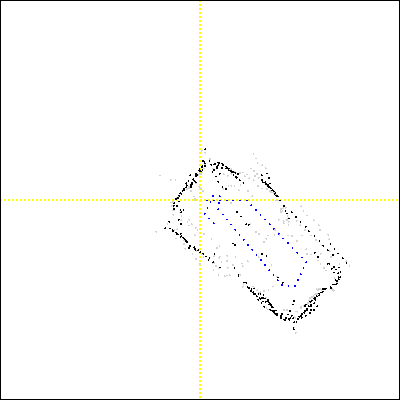
モーション1回の再生で動く距離や回転する角度はほぼ一定です。よって、モーションを行った回数分距離や向きを足し合わせていくことで、おおよその経路がわかります。
また、①で使う距離センサを用いれば、前方にある障害物が検知できるので、地図に障害物のデータも反映させることもできます。
下記の図は、実際にロボットを動かして作成した地図です。フィールドの形と同じように地図ができあがっています。
 |
 |
◆必要な機能について
次回以降、お掃除ロボットの動きを考え、プログラミングしていきます。
・2回目:お掃除ロボットを作るための下準備
・3回目:RCB-4HVとPCプログラムとのやりとりをする
・4回目:アナログデータを取り込み距離データを取得する
・5回目:サーボモータを追加し、広い範囲の距離データを取得する
・6回目:動作コマンドを元にロボットを移動させる
・7回目:距離データをもとに考えて移動し、地図を作成する
それぞれの項目については各回で詳しく説明します。
◆次回予告
2回目:お掃除ロボットを作るための下準備
次回は、お掃除ロボットの動きを再現するために必要なロボットやセンサ、ソフトウェアの紹介をします。また、それぞれの役割や全体の構成について説明をします。
KHR-3HV Ver.3 リフェバッテリー付きセットの詳細をみる KMR-M6 Ver.3 リフェバッテリー付きセットの詳細をみる KHR-3HV Ver.2 リフェバッテリー付きセットの詳細をみる KHR-3HV Ver.2の詳細をみる KHR-3HV Ver.2 セレクトパックの詳細をみる KMR-M6 Ver.2 リフェバッテリー付きセットの詳細をみる カメ型ロボット02 Ver.1.5の詳細をみる KMR-P4 Ver.1.5 リフェバッテリー付きセットの詳細をみる BluetoothモジュールKBT-1の詳細をみる