Archives
HeartToHeart4講座(1-3) ウィンドウについて
前回は、PCとロボットの接続方法について解説しましたが、今回は実際にHeartToHeart4を起動し、HeartToHeart4を使用するために必要な各ウィンドウについて解説します。各ウィンドウの機能や役割を予め知っておくことで、以降の作業が理解しやすくなります。準備が続きますが、ぜひご一読ください。 以下の解説では、HeartToHeart4をHTH4と表記します。 【関連記事】 第一章 HeartToHeart4講座(1-1) 必要な製品と準備 HeartToHeart4講座(1-2) PCとロボットを接続する 第二章、第三章については下記のページからご参照ください。 『HeartToHeart4講座 目次』 ■HTH4を起動する インストール後にデスクトップにアイコンが作成されます。このアイコンをダブルクリックすることでソフトウェアを起動することができます。 アイコンがない場合は、Windowsのスタートメニューから「HeartToHeart4」を選択して起動してください。 インストール後、最初に起動すると下記のようなダイアログが表示されます。 これは、PCの「ドキュメント」フォルダ内に「HeartT...
もっと見るHeartToHeart4講座(1-2) PCとロボットを接続する
前回の記事で必要な製品とソフトウェアが用意できました。この記事では、PCとロボットの接続について解説します。 【関連記事】 第一章 HeartToHeart4講座(1-1) 必要な製品と準備 HeartToHeart4講座(1-3) ウィンドウについて 第二章、第三章については下記のページからご参照ください。 『HeartToHeart4講座 目次』 ■Dual USBアダプターHSのモード Dual USBアダプターHSは、USB本体のスイッチにより2つのモードに切り替えることができます。 ・シリアルモード(緑LED) = RCB-4などボードと通信するモード ・ICSモード(赤LED) = KRSサーボや受信機KRR-5FHなどICSデバイスと通信するモード USBをPCに接続したときに、本体のLEDが点灯します。色でモードがわかりますので、接続後は必ずどちらのモードになっているか確認してください。 今回は、RCB-4と通信するため「シリアルモード」にします。LEDが緑色に点灯しているか確認してください。 ■配線 下記の図のように、シリアル延長ケーブルを中継してPCとロボットを...
もっと見るHeartToHeart4講座(1-1) 必要な製品と準備
KHR-3HVやKXRシリーズのロボットは、モーションデータを登録し再生することで動作します。KONDOには、モーションを作成するためのソフトとして、HeartToHeart4をご用意しています。通常ではロボットの動作を作成するために、複雑なプログラミングが必要になりますが、このソフトウェアを使用することで、GUIによりマウス操作で簡単にモーションを作成することが可能です。 『HeartToHeart4講座』では、HeartToHeart4の使い方について解説しいます。皆さんもぜひモーション作成にチャレンジしてください。 【関連記事】 第一章 HeartToHeart4講座(1-2) PCとロボットを接続する HeartToHeart4講座(1-3) ウィンドウについて 第二章、第三章については下記のページからご参照ください。 『HeartToHeart4講座 目次』 ■HeartToHeart4とは HeartToHeart4(以下HTH4)は、ロボット用プログラミングソフトです。 モーションの作成や書き込みをはじめ、姿勢の調整、ジャイロや加速度などオプションセンサーの設定といったソフトウェアの作業をすべ...
もっと見るサーボコネクタピン変更のお知らせ
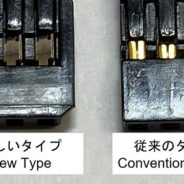
いつも近藤科学をご利用いただきましてありがとうございます。接続ケーブルなどに使用されているサーボコネクタの「コンタクトピン」についてご案内致します。 2020年6月中旬出荷の製品より、サーボリードなどのサーボコネクタに使用しているゴールドメッキのピンの仕様が順次変更になります。変更点は、メッキ加工についてです。従来より色味がシルバーに近い色に変更になりますが、性能面での違いはありません。また、サイズなどの変更もありませんので、これまで通りご利用いただけます。 また、コネクターハウジングのデザインが変更されていますが、コントロールボードなど対応機種に変更はありません。 以上です。 今後とも近藤科学製品を宜しくお願い致します。 ...
もっと見るRaspberryPiとRCB-4の組み合わせ記事まとめ

RaspberryPiとRCB-4を組み合わて使用する記事をこちらにまとめます。 RCB-4 Library for Python ver.1.0.0B 弊社USBアダプタをLinuxで使うには(2024版) RCB-4とRaspberryPiの接続方法 RCB-4 Library Arduino版(V1.1)とPython版(V1.0.0B)の違いについて RaspberryPiとRCB-4との連携について RCB-4の外部からモーションを再生させる方法について RCB-4でモーションとは別に個別にサーボを動かす方法 RaspberryPi搭載用パーツ 3Dデータ(KXR用) ...
もっと見る