Archives
マルチコントローラーMC-8+MR-8をマイコンボードで使用する

8チャンネルのマルチコントローラーMC-8は、ジョイスティックやボタンによる操作で手軽にマシンを無線操縦することができます。近藤科学KOPROPOでは、長年R/Cカー用の無線送信機を開発してきました。MC-8は、KOPROPOの無線技術を採用し、混信しにくく、安定した無線操縦が可能です。イベント会場など2.4GHzが混在する場所でも無線が途切れにくい仕様になっています。今回は、MC-8と対になる受信機MR-8から出力される各チャンネルのPWMを、マイコンボードで読む方法をご紹介します。 この記事では、マイコンボードとしてArduino MKR ZEROを使用しています。 ※弊社では他社マインボード、及びプログラムに関するお問い合わせには対応致しかねます。以下の内容は、仕様事例として参考にご一読ください。 【関連記事】 ArduinoからスピードコントローラMD-1を制御する方法を紹介しています。 『MD-1/MR-8をマイコンボードで使用する』 RaspberryPiからスピードコントローラMD-1を制御する方法を紹介しています。 『スピードコントローラMD-1をRaspberryPiから制御する』 ■マルチ...
もっと見るRCB-4変換基板の使用方法(5) setKrrButton編
【ここまでの関連記事】 『RCB-4変換基板の使用方法(1) 準備編』 『RCB-4変換基板の使用方法(2) 搭載編』 『RCB-4変換基板の使用方法(3) Rcb4MotionPlay編』 『RCB-4変換基板の使用方法(4) M5StickCからRCB-4のモーションを再生する』 これまでご紹介した手順でArduinoからロボットに搭載しているRCB-4からモーションを再生することが可能になりました。 今回は、『RCB-4 Library for Arduino』に付属するサンプルプログラム「Rcb4SetkrrButton」を例に任意の長さで連続で歩行する方法をご紹介します。 ■setKrrButton()関数とは これまで使用したmotionPlay()関数は、RCB-4内に登録したモーションをモーション番号を指定して再生しました。この方法は非常に簡単ですが、登録したモーションを再生するのみで、例えば5歩歩行したいときは5歩歩くモーションを事前に作成し、登録してく必要があります。 そこで今回ご紹介するsetKrrButton()関数を使用します。setKrrButton()関数は、ボタンデータをRCB-4に送...
もっと見るRCB-4変換基板の使用方法(4) M5StickCからRCB-4のモーションを再生する

【関連記事】 RCB-4変換基板の使用方法(3) Rcb4MotionPlay編(R4改訂版) RCB-4変換基板の使用方法(3) Rcb4MotionPlay編 RCB-4変換基板の使用方法(2) 搭載編 RCB-4変換基板の使用方法(1) 準備編 RCB-4変換基板を中継してM5Stack社のM5StickCからRCB-4miniに登録されているロボットのモーションを再生する方法をご紹介します。 M5StickCは小型軽量ですので、ロボットに搭載したときに負荷が少なく使い勝手が良いデバイスです。この記事では、二足歩行ロボットであるKXR-L2に搭載しますが、同じくRCB-4miniを搭載しているKXRシリーズの各ロボットや、RCB-4HVを搭載しているKHR-3HVや自作ロボットでも同様の方法でモーション再生が可能です。RCB-4mini、またはRCB-4HVをご利用されている方は、ぜひお試しください。 ※M5StickC、及びプログラムに関連するお問い合わせについて、弊社は対応致しかねます。下記の記事は、使用事例として参考にご一読ください。 ※以下の記事では、RCB-4HV、RCB-4miniを併せて”RCB-4”...
もっと見るB3Mサーボモータを動かそう(Arduino制御編)
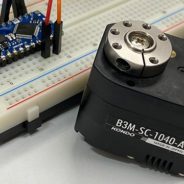
ロボットにB3Mサーボを組み込んだ場合は、マイコンボードから制御できると便利です。これまで弊社サポート記事では、PCからの制御方法をご紹介してきましたが、今回は、RS485USB/シリアル変換アダプターを経由し、Arduino Nano EveryからB3Mサーボを制御する方法をご紹介します。 この記事では、シリアル通信に『ICS Library for Arduino ver.2』の一部の関数を利用して通信します。下記のライブラリをダウンロードし、付属のマニュアルに従いインクルードしてください。 『ICS Library for Arduino ver.2』 ※サーボとの通信に使用するsynchronize関数を使用するためには、Ver.2.1以降のライブラリが必要です。すでにご利用いただいている方は、バージョンのご確認をお願いします。 また、B3Mサーボの制御に関しては、B3Mソフトウェアマニュアルをご参照ください。下記の手順は、マニュアルのP.48~52の「6.B3Mサーボを動かしてみる」に従ってプログラムしています。 『B3Mソフトウェアマニュアル Ver.1.2.0.0』 ※弊社では他社マインボード、及びプログラ...
もっと見るICS変換基板の使用方法(6-3) Arduino MEGAからKXR-L6の歩行制御
前回に引き続き、ICS変換基板とArduino MEGAを組み合わせて、KXR-L6のサーボを制御します。今回の記事では、KXR-L6の歩行制御について解説します。 この記事の内容を実行する場合の必要な準備は、前々回の記事をご参照ください。 ※弊社では他社マインボード、及びプログラムに関するお問い合わせついて対応致しかねます。以下の内容は、仕様事例として参考にご一読ください。 【これまでの関連記事】 ICS変換基板の使用方法(1) 準備編 ICS変換基板の使用方法(1) 準備編(R4改訂版) ICS変換基板の使用方法(2) サーボ制御編 ICS変換基板の使用方法(2) サーボ制御編(R4改訂版) ICS変換基板の使用方法(3) 無線コントロール編 ICS変換基板の使用方法(3) 無線コントロール編(R4改訂版) ICS変換基板の使用方法(4) ID読み書き編 ICS変換基板の使用方法(4) ID読み書き編(R4改訂版) ICS変換基板の使用方法(4-2) M5StackでID読み書き ICS変換基板の使用方法(5) Arduino Nano EveryでKRSサーボを制御 ...
もっと見る