HTH4 Ver2.0以降 ロボットとの通信がうまくいかなかったら
HeartToHeart4(以下HTH4) Ver2.0以降を使用していて通信がうまくいかない場合は、下記の対処方法をお試し下さい。
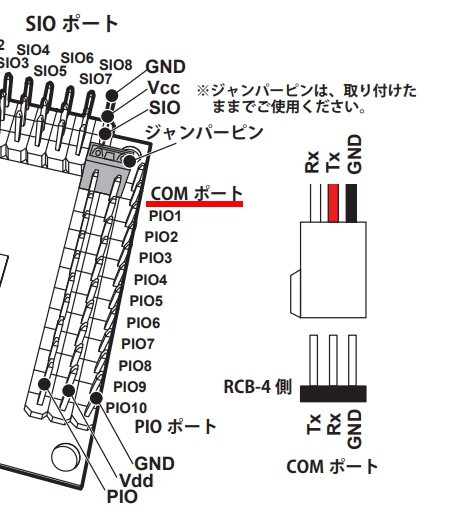
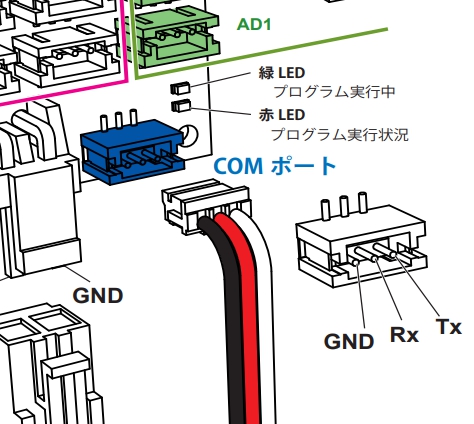
1)Dual USBアダプターのケーブルがRCB-4のCOMに正しく接続されているか確認してください
RCB-4(HV / mini)のCOMにDual USBアダプターHS(緑LED)からのケーブルがRCB-4のCOMへ正しく接続できるか確認してください。
■RCB-4HVのCOMポート
■RCB-4miniのCOMポート
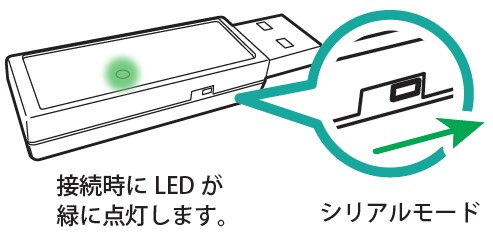
2)PCに接続したDual USBアダプター本体のLEDが緑色に点灯しているか確認してください
Dual USBアダプターは、RCB-4(HV/mini)などボードと通信するための「シリアルモード」と、KRSサーボなどと通信するための「ICSモード」の2種類を本体のスイッチで切り替えて選択することができます。どちらのモードになっているかは、本体のLEDの色で確認することができます。
緑色に点灯 = 「シリアルモード」ボードと通信するモード
赤色に点灯 = 「ICSモード」KRSサーボなどと通信するモード
今回は、RCB-4と通信しますので「緑」に点灯していることを確認し、赤色だったらスイッチを緑に切り替えてください。
3)PCとUSBアダプター間のケーブルの種類が正しいかを確認してください
PCとUSBアダプターの間は、「1.5mシリアル延長ケーブル」を使用して接続します。
※USBアダプターに別途付属している「白黒延長ケーブル」は使用しません。「白黒延長ケーブル」は赤線がありませんので「シリアルモード」では通信ができなくなります。

4)バッテリーが十分に充電できているか確認してください
お手持ちのバッテリーの充電状態が不十分ですと、電源投入後サーボが起動した際に電圧降下でボードに対して十分な電源が供給されない場合があります。市販のバッテリーチェッカーやテスターなどで電圧を確認し、電圧が低い場合はバッテリーを充電してからご利用ください。
リチウムフェライトバッテリーの電圧を確認する方法は、下記の記事をご参照ください。
※リチウム系のバッテリーは、充電が不十分の状態で使用し続けるとバッテリーが破損する可能性があります。バッテリーの電圧管理を徹底していただきますようお願い致します。
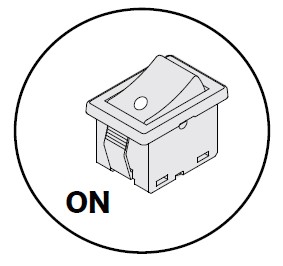
5)ロボットの電源がONになっているか確認してください
PCとRCB-4が通信するためには、RCB-4に電源が供給されている必要があります。上記の項目に加え、ロボット本体とバッテリーが正しく接続されていることを確認し、ロボット本体のスイッチをONにしてください。
1)~5)までの手順に間違いがなければ、電源ONの直後にRCB-4の2つのLED(赤 / 緑)が点灯し、すぐに消灯します。LEDの点灯状態を確認して次のステップに進んでください。
6)COM番号とCOM通信速度を合わせてください
HTH4からRCB-4へ何度命令を送っても通信に失敗してしまう場合があります。その原因の一つとして、RCB-4とHTH4のCOM通信速度が一致していないことが考えられます。
▼対処方法
まず、COM番号が正しく選択されSBアダプターが認識されているかを確認してください。また、表示されているCOM番号が正しくても認識されない場合は、もう一度選択しなおすとうまくいく場合があります。
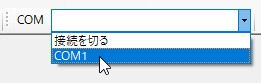
※COM番号の確認方法はUSBドライバーソフトウェア付属の「KO_Driver.pdf」をご参照下さい。
メイン画面に表示されている「COMツールバー」の”COM”をクリックすると自動でRCB-4との通信速度を合わせることができます(画像内①)。「COMツールバー」が表示されていない場合はメニューの「表示」から「COM」にチェックを入れると表示されます。
また、「プロジェクト設定」画面を開き「COM通信速度」を変更すると、選択した通信速度にRCB-4が設定されますので両者の通信速度を一致させることが可能です。
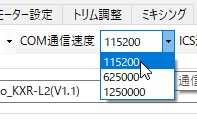
この方法はRCB-4にプロジェクトを書き込むまでの一時的な通信設定ですので、RCB-4の電源を切ると設定は消えてしまいます。ボードの通信速度を保存する場合は一度プロジェクト全体を書き込んでください。
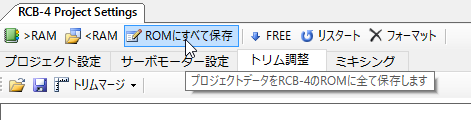
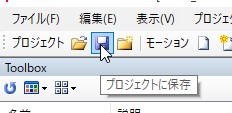
作業を終了したら必ずプロジェクトの保存をしてください。
※以下のICS通信速度の設定は、KHR-3HVを22軸に組み替えた場合などが対象になります。キットそのままの状態でサーボの通信速度を書き換えていない場合は、以下の作業は行わないでください。
7)ICS(KRSサーボ)の通信速度を合わせてください
RCB-4とHTH4の通信はできても、命令通りにサーボが動作しない場合があります。また、スタートアップモーションがうまく再生されなかったり、無線機のボタン操作どおりにロボットが動作しない場合があります。その原因の一つとして、HTH4で設定したRCB-4のICS通信速度と、RCB-4に接続したサーボモータのICS通信速度が一致していないことが考えられます。
▼対処方法
まず、サーボモータの通信速度を調べます。Dual USBアダプターHSを赤LEDに切り替え、サーボを接続し、対応するシリアルマネージャーソフトを起動してサーボからデータ読み込みを行ってください。ICS3.0では”RATE”、ICS3.5 / 3.6では”通信速度”に現在のサーボの通信速度が表示されます。
※接続方法、ソフトの使用方法などは付属のマニュアルをご参照下さい。
※各サーボとも出荷時の通信速度は115200bpsに設定されています。
※1体のロボット内にICS通信速度が異なるサーボが混在していると、通信がうまくいかず思わぬ動作をしてしまう場合があります。通信速度を変更する場合は、必ずすべてのサーボの通信速度を変更してください。また、受信機KRR-5を搭載している場合は、KRR-5の通信速度も忘れずに変更してください。
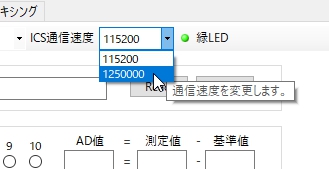
「プロジェクト設定」画面を開き「ICS通信速度」にサーボと同じ通信速度を設定してください。この作業でRCB-4のSIO端子の通信速度とサーボの通信速度が一致するため、正常にサーボと通信することが可能になります。
作業を終了したら必ずプロジェクトの保存をしてください。
HeartToHeart4の詳細をみる KHR-3HV Ver.3 リフェバッテリー付きセットの詳細をみる KMR-M6 Ver.3 リフェバッテリー付きセットの詳細をみる KHR-3HV Ver.2 リフェバッテリー付きセットの詳細をみる KHR-3HV Ver.2の詳細をみる KHR-3HV Ver.2 セレクトパックの詳細をみる KMR-M6 Ver.2 リフェバッテリー付きセットの詳細をみる カメ型ロボット02 Ver.1.5の詳細をみる KMR-P4 Ver.1.5 リフェバッテリー付きセットの詳細をみる