KMR-M6をリモートブレインで動かす(2回目)
2回目:お掃除ロボットの動きを再現させるための下準備
◆前回のおさらい
前回、KMR-M6を使ってお掃除ロボットの動きを再現させる方法について説明しました。
今回は、必要なロボットやセンサ、制御するためのソフトウェアについて紹介します。
◆前記事
◆全体の構成
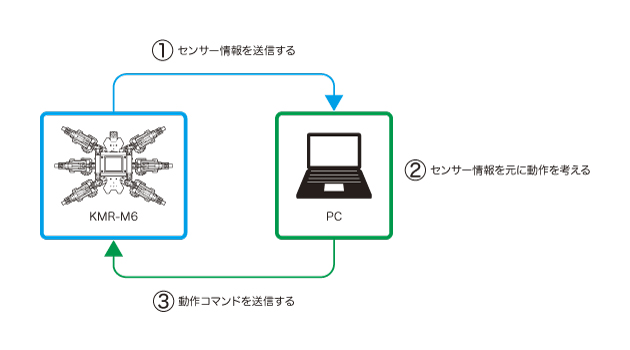
KMR-M6でお掃除ロボットの動きを再現するためには、PCとKMR-M6間で以下のやり取りを行います。
- ロボットに搭載している距離センサのデータをPCが受けとる
- PCが受け取ったセンサデータをもとに次の行動を決定する
- 決定した行動をロボットに送信する
以上を繰り返します。
|
|
| KMR-M6とPCとのやり取り |
◆必要なハードウェア
○ロボット:KMR-M6
自律で地図を作成するには安定して歩行することが求められます。二足歩行ロボットより歩行が安定している6足歩行ロボットKMR-M6を使います。
自律で移動するために必要な前後や旋回などの動作はKMR-M6キット付属のサンプルモーションを使って、手軽にロボットを動かせるようにします。
(ロボット本体は、RCB-4HVを搭載している
KHR-3HVなどのロボットであれば、KMR-M6と同じように
制御することができます)
○無線モジュール:KBT-1+市販のbluetoothアダプタ
 RCB-4HVとPCを無線で通信するためには、無線モジュールKBT-1(ロボット側)と市販のBluetoothモジュール(PC側)を用います。
RCB-4HVとPCを無線で通信するためには、無線モジュールKBT-1(ロボット側)と市販のBluetoothモジュール(PC側)を用います。
キット付属のUSBアダプタではケーブルの長さが限られているため、床を自由に動きまわることができませんでしたが、無線にすることでケーブルを気にせず動き回ることができるようになります。
KBT-1の使い方については、KBT-1を使ってロボットと無線通信をする(2)をご覧ください。設定は、スレーブRCB-4に設定します。
※本製品はBluetooth®2.0に対応しております。4.0には対応しておりません。あらかじめご了承下さい。
| SW1 | SW2 | |||
| スイッチ番号 | 1 | 2 | 1 | 2 |
| スレーブRCB-4モード | ON | OFF | OFF | ON |
○距離センサ:PSD(位置検出素子)センサー

○サーボモータ:KRS-2552HV(KRS-2542HVでも可)

◆必要なソフトウェア
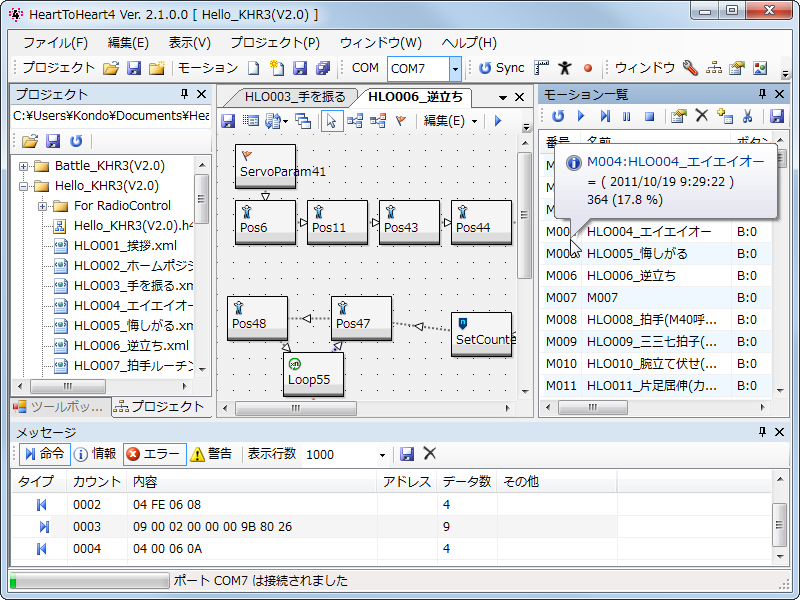 ○HeartToHeart4
○HeartToHeart4
KMR-M6の前進や旋回などのモーションの作成や管理をします。作成したモーションをRCB-4HVに保存します。PCからコマンドを送り、保存したモーションを再生させることができます。詳しくはこちらに掲載しております。KMR-M6の付属CD-ROMの中にもHeartToHeart4の説明書がありますので、そちらもご覧ください。
○Visual Studio
ロボットの行動を決めたり、行動に応じたコマンドをRCB-4HVに送ったりするプログラムの作成に使います。RCB-4HVのコマンドはそのままで扱うことは難しいので、Visual Studio上でRCB-4HVの機能を簡単に使えるようにRCB4ライブラリを用意しています。RCB4ライブラリを使うと、RCB-4HVのコマンドをプログラムでわかりやすいように変換できます。ライブラリの使い方については次回(3回目)詳しく説明します。
有償版のVisual Studioでもプログラミングができますが、Express版(無償版)でももちろん使用いただけます。Visual C++や Visual Basic でもプログラミングできますが、今回はVisualC#で作成します。
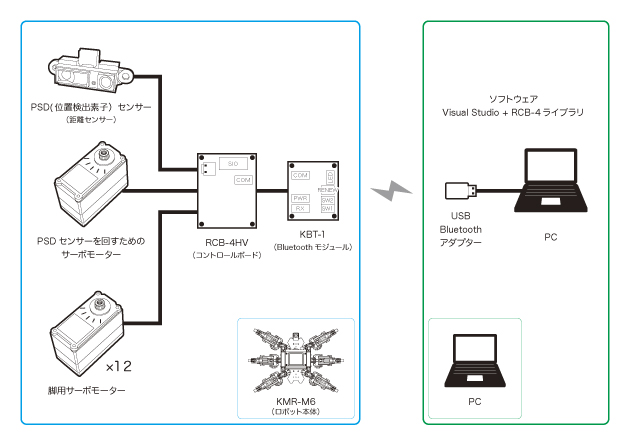
◆全体構成
下の図は全体構成をあらわしています。
 |
|
内部構成図
|
ロボットは、RCB-4HVを中心として、各サーボモータの制御やPSDセンサのデータの取得を行っています。
PCでは、MicrosoftのVisual Studioを用いてシリアル通信のプログラムを作成し、KBT-1を使ってKMR-M6にセンサの読み取りやモーション再生コマンドを無線で送ります。
◆次回予告
3回目:RCB-4HVとPCプログラム間で通信を行う
今回は、お掃除ロボットの動作を再現するために必要なロボットやソフトウェアについて説明してきました。次回は、PCで作成したプログラムでロボットと通信をできるようにします。
KHR-3HV Ver.3 リフェバッテリー付きセットの詳細をみる KMR-M6 Ver.3 リフェバッテリー付きセットの詳細をみる KHR-3HV Ver.2 リフェバッテリー付きセットの詳細をみる KHR-3HV Ver.2の詳細をみる KHR-3HV Ver.2 セレクトパックの詳細をみる KMR-M6 Ver.2 リフェバッテリー付きセットの詳細をみる カメ型ロボット02 Ver.1.5の詳細をみる KMR-P4 Ver.1.5 リフェバッテリー付きセットの詳細をみる BluetoothモジュールKBT-1の詳細をみる