Archives
低頭ケースビスのご紹介

ケースビスのサイズがM2.6のサーボ用に、長さ16mm、18mm、20mmの低頭ビスが新たにラインアップしました。この記事では、KRS-5000を例に実際に低頭ビスをサーボに組み込んだ状態をご紹介します。 【低頭ビスラインアップ】 ・M2.6-16低頭ビス(50本入り) ・M2.6-18低頭ビス(50本入り) ・M2.6-20低頭ビス(50本入り) ■対象サーボ フレーム固定ビスがM2.6のサーボケースであればこちらの低頭ビスをご利用することができます。使用する個所、固定するフレームの厚さに合わせて長さをお選びください。 ・KRS-5054 / 5053 / 5034 / 5033 / 5032HV ICS 【寸法図】【フレーム取り付けビス参考図】 ・B3M-SB-1040-A / B3M-SC-1040-A 【寸法図】【フレーム取り付けビス参考図】 以下の機種はアッパーケース側(出力軸側)のみ対応します。ボトムケース側は長さが足りませんので別途ご用意ください。 ・KRS-9004HV ICS 【寸法図】【フレーム取り付けビス参考図】 ・KRS-6003R2HV ICS 【寸法図】【フレーム取り付けビス参考図】 (従来の6000シ...
もっと見るMD-2をマイコンボードで使用する
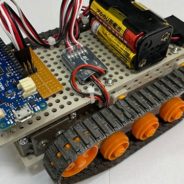
MD-2は、2つのモータで前後進、左右旋回をするタンクモデルなどのマシンに最適な小型で使いやすいスピードコントローラです。一般的には無線コントローラとの組み合わせで使用しますが、マイコンボードからPWM信号を入力することにより、モータを制御することも可能です。MD-2を使用することにより、自律ロボットなど作成する際に、モータドライバ回路を用意する手間なく、簡単にマシンを制御することができます。 この記事では、Arduinoを例にマイコンボードからMD-2を制御する方法をご紹介します。 【関連記事】 同じスピードコントローラのラインアップとして、MD-1があります。MD-1は1つのモジュールで1つのモータを制御することが可能です。こちらの制御方法も公開していますのでご参考にしてください。 『MD-1/MR-8をマイコンボードで使用する』 『スピードコントローラMD-1をRaspberryPiから制御する』 また、ArduinoにマルチコントローラーMC-8の受信機MR-8を接続し、無線化する方法を解説しています。 『マルチコントローラーMC-8+MR-8をマイコンボードで使用する』 ■MD-2について ■商品ページ M...
もっと見るMD-2(ツインモーターミキシングESC) 製品マニュアル
MD-2(ツインモーターミキシングESC)の製品マニュアルを公開します。 MD-2_Manual_JP_V1_0.pdf ...
もっと見るKHR-3HV Ver.3 サーボIDシール変更のお知らせ

「KHR-3HV Ver.3」と「KHR-3HV拡張用サーボ5個セット Ver.3」に付属しているサーボモータのサーボIDシールのデザインが変更になりましたのでご案内します。 ※製品の性能などは変更ございません。シールデザインのみ変更になります。 ※サーボ搭載個所に対するID番号の変更はございません。従来ID1の個所はそのままID1です。 ■対象商品 ・KHR-3HV Ver.3 リフェバッテリー付きセット(No.03210) ・KHR-3HV拡張用サーボ5個セット Ver.3(No.03199) ■変更時期 2022年4月12日出荷分より ■対応マニュアル 新しいIDシールに対応した組立説明書を公開しました。 一括でダウンロードする場合は、下記のページからVer.7.2をダウンロードしてください。 『KHR-3HV Download set(取扱説明書・ソフトウェア)Ver.7』 個別にダウンロードする場合は、下記のページをご参照ください。 『KHR-3HV 組立説明書Ver.4.0』 『KHR-3HVオプション搭載マニュアル(5軸拡張オプション)』 新しいデザイン ...
もっと見るKMR-M6 Download set(取扱説明書・ソフトウェア)
KMR-M6に対応する取扱説明書やソフトウェアのセットをダウンロードいただけます。ダウンロードしたフォルダの内容でKMR-M6に関連するすべての資料、ソフトが揃います。 【日本語版】 Ver.3.0 KMR-M6_P4_Download_V3_0 (114MB) ...
もっと見る