Archives
ICS3.5/3.6 Manager software
ICS3.5/3.6マネージャーソフトウエアのアップデート版を公開します。 こちらのソフトでIDの設定や通信速度の変更、スピードやストレッチの変更などICS3.5、3.6対応サーボの各種設定を行っていただくことが出来ます。 このマネージャソフトの使用方法は、ソフトウェア付属のマニュアルと、こちらの記事をご参照ください。 『ICS3.5/3.6 Managerの使い方』 【R1.2.1.0の変更点】2023/6/19公開 ・軽微なバグを修正しました。 ・.NET Frameworkのバージョンを4.8に上げました。 ICS3.5/3.6 Manager softwareR1210 ※ファイルは圧縮ファイルで提供されています。解凍すると Ics35_3.6Manager1210フォルダが出来ますのでフォルダを適当な場所に コピーしてご使用ください。 なお、古いバージョンをお使いの場合には、あらかじめ前のバージョンの ファイルを削除して下さい。 ※使用するためには別途 Dual USBアダプターHSまたは、ICS-USB アダプターHS を 用意して頂く必要があります。 ■過...
もっと見るサーボホーン規格一覧
2021.8.16公開 サーボホーン規格一覧 Ver.3.0 各サーボホーンに対して使用できるサーボを一覧にまとめました。製品を選択する際に参考にしてください。 サーボ別サーボホーン対応表 各サーボで使用できるサーボホーンの対応表です。 【過去の一覧表】 サーボホーン規格一覧 Ver2.0 ...
もっと見るKRS-5000 / 4000シリーズ スペック比較

KRS-5000シリーズ(以下5000)は、KRS-4000(以下4000)シリーズの上位機種にあたります。一部変更はありますが、外形がほぼ同じですので4000から5000へ換装しやすくなっています。5000は4000より耐久性が高く、スペックが向上していますので載せ替えに大変お勧めです! この記事では、5000、4000のスペックを比較しながらKRS-5000シリーズの魅力をお伝えしていきたいと思います。 ■商品情報 KRS-5000シリーズは、下記の5種類の製品があります。末尾に"H.C"がついている商品は、アッパーケース(出力軸側のケース)がアルミになっており、他はガラス繊維入りの強化樹脂です。 5054/5034は、トルクタイプ、5053/5033はスピードタイプ、5032はハイスピードタイプのギヤ比になっています。詳細な情報は、下記のリンクから商品ページをご参照ください。 KRS-5054HV ICS H.C KRS-5053HV ICS H.C KRS-5034HV ICS KRS-5033HV ICS KRS-5032HV ICS ■スペック比較表 上記の表のとおり、4000と比較して5000は全機種で最高スピードはほ...
もっと見るスピードコントローラMD-1をRaspberryPiから制御する
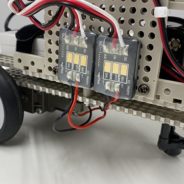
スピードコントローラMD-1は、RCサーボを制御するときに使用するPWMと同じパルス幅で制御できるモータドライバです。RC向けの受信機や、PWMを出力できるマイコンボードなどからPWMを出力することにより制御することが可能です。MD-1を使用することで、モータドライバを自作する手間を省くことができます。さらに、マイコンボードにRCサーボ用のライブラリが用意されていれば、そのまま使用して回転数、回転方向の指定が簡単にできます。 今回は、RaspberryPiを使用してMD-1を制御する方法をご紹介します。 【関連記事】 Arduinoから制御する方法も公開しています。詳しくは下記のサポート記事をご参照ください。 『MD-1/MR-8をマイコンボードで使用する』 ArduinoにマルチコントローラーMC-8の受信機MR-8を接続し、無線化する方法を解説しています。 『マルチコントローラーMC-8+MR-8をマイコンボードで使用する』 ■MD-1について ■商品ページ MD-1(ニュートラルブレーキ仕様) ¥2,728 (税込)(No.40452) MD-1は小型DCモータ用のスピードコントローラ基板です。最大370サイズの...
もっと見る