ニュース
KHRシミュレータ公開
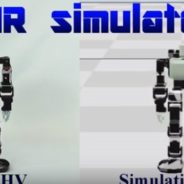
弊社KHR-3HVをシミュレータ上で動かすことができる『KHRシミュレータ』が公開されました。 ※こちらのシミュレータは、近藤科学の製品ではございませんのでお問い合わせにはお答えできません。また、作成元へのサポートにも対応しておりません。予めご了承ください。 二足歩行ロボットKHR-3HV(近藤科学株式会社製)のシミュレータを公開します。Coppelia Robotics社から無償で公開されているV-REP Playerと同時に使うことで、数値計算による物理シミュレーションにより、実機を使わずにKHR-3HVの動作をCG(コンピュータ・グラフィックス)でリアルタイムに確認できます。 KHRシミュレータではKHR-3HVに搭載されているCPUボードRCB4の動作も含めてシミュレートしているので、実機と同じコマンドで制御できるようになっています。そのためサンプルモーションや既存のロボットモーションに手を加えることなく、そのまま実行できます。 また近藤科学社のモーション作成ソフトウェアHeartToHeart4(HTH4)や自作のロボットコントロールプログラムとも、容易に連携できます。シミュレータと実機を自由に切り換えられるので、シミュレータを使って開発・検証し...
もっと見るマルチコントローラーMC-8 発売!

新商品のマルチコントローラ『MC-8』をご紹介します! MC-8とオプション関連は、2019年8月下旬出荷開始です。 ●MC-8とは MC-8は、PWM信号で制御する機器を8チャンネル制御できるマルチコントローラです。PWM信号で制御するサーボやスピードコントローラを接続することができますので、RCカーの操縦は元より、工作セットや自作ロボットなど、多彩なマシンを無線コントロールすることができます。 操縦方法は、スティック操作が4チャンネル、ボタン操作が4チャンネルです。 MC-8専用の受信機MR-8と組み合わせてご利用できます。 【商品ページ】 MC-8 2.4GHz MX-F 送受信機セット(MR-8付属) MR-8 2.4GHz MX-F(受信機のみ) 【ご注意ください】 本製品は、RCBシリーズを搭載したロボットには対応していません。KHR-3HV、KXRシリーズなどロボットキットにはご利用いただけませんのでご注意ください。 ロボットキットには、KRC-5FHをご利用ください。 ●スピードコントローラMD-1 130サーズから370サイズのDCモータに対応するスピードコントローラです。モ...
もっと見る【CIT Brains】 RoboCup Asia-Pacific2019 ヒューマノイドリーグ優勝
5月16日~18日に天津で開催されたRoboCup Asia-Pacificのヒューマノイドリーグにて、弊社のB3Mサーボをご採用いただいているCIT Brains様が優勝しました! おめでとうございます!! ■RoboCup Asia-Pacific(RCAP)天津大会 http://robocupap.org/index.php/tianjin2019/ ■ロボットの詳細は下記をご参照ください。 https://kondo-robot.com/archives/15775 ...
もっと見るKHR 15thアニバーサリー開催のお知らせ

このイベントは終了しました。たくさんのご参加、ご来場いただきまして誠にありがとうございました! ■リザルト ・KHRクラス<ダウンロード> 【優勝】クロムキッド ・KXRクラス<ダウンロード> 【優勝】ボイジャー 両者とも前回の28回KONDO BATTLEから2連覇!!おめでとうございます!! 2004年にKHR-1が発売されてから今年で15周年になります。これまでご利用いただいたKONDOユーザーの皆様へ感謝の気持ちを込めて、8月25日に15thアニバーサリーイベントを開催します! さらに、KHR-3HVが2009年に発売されてから、なんと10周年!KHR-3HVにとっても記念すべき年となりました! もちろん、KRSサーボ、KXRシリーズのユーザーの皆様にもご参加できるカテゴリーをご用意しております! 15thアニバーサリーイベントにぜひご参加ください! ■イベント概要 日にち:8月25日(日) 内容:クラス別バトルイベント KHRクラス、KXRクラスのバトルイベントを開催します! 会場:3331 Arts Chiyoda コミュニティスペース特設会場 〒...
もっと見るKRS-6104FHV 発売のお知らせ

新商品『KRS-6104FHV ICS』の発売が決定しましたのでご案内します! 追記:本製品の出荷を開始しました!ご購入の際はお取扱店様へお問い合わせください。 ★★★発売記念キャンペーン★★★ KRS-6104FHV発売記念キャンペーンと致しまして、数量限定でアルミサーボホーン(Iカット型)をプレゼント! 数に限りがございますので、ご購入はお早めに! ※サーボ1つにつき1個のサーボホーン、ホーン止めビスをプレゼントします。 ※キャンペーンは、予定数に達し次第終了とさせていただきます。 KRS-6104FHV ICS <スペック>(11.1V時) ●最大トルク:70.0kgf・cm(暫定値) ●最高スピード:0.23s/60°(暫定値) ●寸法:54.2 × 37.4 × 39.5 mm(突起部除く) ●重量:113g(本体のみ) ●最大動作角度:270° ●最大消費電流:6.1A ●ギヤ種類:特殊アルミギヤ +ステンレスギヤ ●ケース材質:アルミ(トップ、ミドル) ガラス入り樹脂(ボトム) ●ギヤ比:362.88:1 ●電源電圧:HV仕様(9V~12V) ●通信規格:ICS3.6(シ...
もっと見るRCB-4 Library for Pythonのβ版を公開しました!

RaspberryPiなどシングルボードを含むコンピュータから、RCB-4のモーションを再生するためのライブラリを公開しました。このライブラリを使用することで、KHR-3HVやKXRシリーズなどRCB-4を搭載したロボットを外部から手軽に制御できるようになります。 ロボットの制御はRCB-4、画像処理などを外部のコンピュータが担当することで、煩雑なサーボ制御を全てRCB-4に任せ、コンピュータの負担を少なくするメリットがあります。 さらに、HeartToHeart4のミキシング機能やループ機能に関連する便利な関数も多数ご用意しています。 このライブラリはPythonで書かれていますので、Pythonが動作する環境でご利用いただけます。 ※このライブラリはβ版です。環境によってはご利用いただけない場合があります。 ライブラリは下記の記事からダウンロードしてください。 『RCB-4 Library for Python ver.1.0.0B』 モーションの再生方法は二種類あります。 ・モーション番号を指定して再生する(MotionPlay) ・モーションに割り当てられたボタンデータで再生する(SetButton) 各関数を使い分けることによって、状況に応じた...
もっと見る
「ZEONIC TECHNICS」プロジェクトが発表されました。

2018年10月16日より開催するCEATEC出展のバンダイナムコホールディングスにて「ZEONIC TECHNICS」プロジェクトが発表されます。 (株)バンダイナムコホールディングス(IoTタウン2018) 小間番号:S015-12 弊社のロボットに関する技術、ノウハウが高く評価され、本件にて弊社もプロジェクトに参画することが決定致しました。 本件のお問い合わせは株式会社バンダイ様宛にご連絡ください。 ...
もっと見るKRSサーボの通信モードについて

KRS-3300/3200シリーズの通信モードについて、表記に誤りがありましたので訂正致します。 誤:●初期設定:PWMモード 正:●初期設定:ノーマルモード(PWM/シリアル両対応) 対象サーボ:KRS-3301 / 3302 / 3304 / 3304R2 / 3204 ICS お詫びして訂正申し上げます。 ■ICSの通信モードについて KRSサーボに採用している通信規格ICSの3.5/3.6で使用できる通信方式は「シリアル通信」と「PWM」ですが、選択できる機能としては「ノーマルモード」と「シリアル専用モード」の二つの通信モードがあります。 【ノーマルモード】 電源起動時の信号線のHigh/LowによってシリアルモードとPWMモードが切り替わります。 500msHighの場合 シリアル通信で制御するモードで起動します。各パラメータの変更もこのモードで行います。 500msLowの場合 PWMで制御するモードで起動します。 【シリアル専用モード】 電源起動時の状態に関係なくシリアル通信で制御するモードです。上記のノーマルモードでもシリアル通信は可能ですが、...
もっと見るKXR-L4T-R カメ型・ローバー型 Ver.2発売のお知らせ

KXR-L4T-R カメ型・ローバー型がVer.2になってリニューアルします! KXR-L4T-R カメ型・ローバー型 Ver.2(アカデミックパック) No.03156 オープン価格(参考価格:49,800円(税別)) ■出荷予定日:2018年7月5日(木) 【プログラミング学習に最適なArduino向けシールドが付属】 Ver.2のアカデミックパックには、「KXRプログラミング学習用シールドセット(Arduino用)」が付属します。このシールドを使用することでArduino Uno R3から弊社製シリアルサーボやロボットのコントロールボード(RCB-4mini)に直接命令を送ることができます。また、距離を計測できるPSDセンサも付属します。 Arduinoとの組み合わせを解説したマニュアルやサンプルプログラムも公開中です。 マニュアルでは、使用する機器の説明や搭載方法、各ソフトの準備から弊社シリアルサーボの制御方法、コントロールボードへのモーション再生命令など、ロボットを動かすための基礎的な項目をまとめました。 サンプルプログラムは、PSDセンサで周囲の距離の計測し、取得したデータを比較してソート、Switch文で再生するモーションを判別して自動で...
もっと見るサーボ使用事例【CIT Brains様】

RoboCupにてすばらしい成績をおさめているCIT Brains様が、全身にB3Mサーボを使用した二足歩行ロボットを作成しましたのでご紹介します。 製作者:CIT Brains ロボット名:GankenKun 全身の関節にB3M-SC-1040-AとB3M-SC-1070-Aを組み合わせて使用しています。 ロボットのスペックは下記の通りです。 【スペック】 ・自由度:20自由度 ・開発期間:2016年~現在 ・サイズ:全長600mm程度 ・重量:4.0kg程度 2018年6月にカナダで開催されるRobo Cup世界大会への出場が決まっています。 Open Platform ロボットとして下記のページで情報が公開されていますのでぜひご参照ください。 CIT Brains様ウェブサイト『GankenKun』 ...
もっと見る第7回ROBO-剣 結果報告
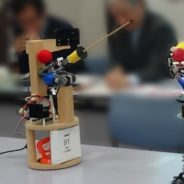
2018年4月14日に開催された第7回ROBO-剣の優勝者をご紹介します。 【第7回ROBO-剣 優勝】 ロボット名:逡巡 制作者:山口自動機械 山口自動機械さんは第一回ROBO-剣から参加されています。今回も完全自律のロボットで大会に参戦し見事優勝しました。無駄な動きが少なく、狙ったポイントに的確に攻撃をしかけて一本を奪う素晴らしい制御でした。 ロボット本体には、KRS-6003HV ×1、KRS-4034HV ×2と手先にKRS-3304 ×2が組み合わせて使用されています。 さらに、今大会では「画像処理テクニック賞」も受賞されています。 ロボットの詳細はこちらをご覧ください。 【ROBO-剣について】 (画像:決勝戦 逡巡VSヨッシー1号) ROBO-剣とは、アームロボットに竹刀を装着して剣道を行う大会です。赤い球を「面」、青い箇所を「胴」、黄色い箇所を「こて」とし、剣道に近いルールで戦います。基本的に自律制御での参加となっていますが、参加2回まで操縦も認められています。 回を重ねるごとに参加ロボットが進化し続け、剣道らしい攻防が見られるようになりました。今後の発展にぜひご注目ください。 ■ROBO-ONEオフィシャルサイト『第7回...
もっと見る