









B3M-SB-1040-A
価格: オープン
生産終了品
■5個セット:No.03073 オープン
<スペック>
- 最大トルク:4.1[Nm](42[kgf・cm])
- 無負荷回転数:45[rpm](0.22[s/60°])
- 寸法:32×32×51mm
- ケース種:B3M-1000シリーズ
- 重量:88[g]
- 最大動作角度:±320[degree](±327.67[degree])※位置制御モード時
- 動作電圧:安定した電源で6V~12V
- 待機電流:80[mA]
- ストール電流:2.8[A]
- 減速比:362.88:1
- 動作環境温度:0~40[℃]
- 制御分解能:12bit/1round(0~4095)
- 動作方式:位置制御、速度制御
- モード切替で360°無限回転モードがご利用できます。
より詳細なスペックはこちらです。
<インターフェース>
- RS-485 USBアダプターHS
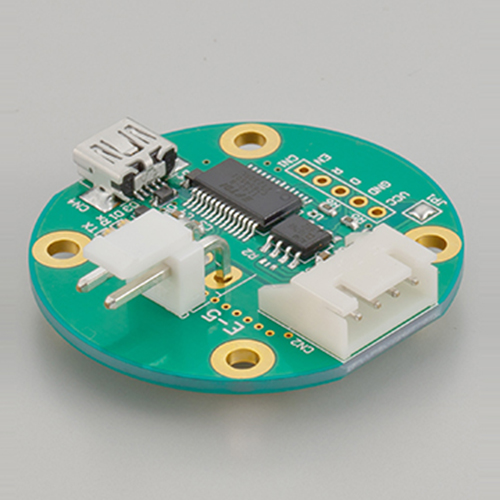
- RS-485変換基板
「HC-6P/XH変換ケーブル(200mm)」と一緒にご利用ください。
<付属品>
【単品】
XH接続ケーブル(400mm) ×1本
アルミクランプホーン ×1個
【5個セット】
XH接続ケーブル(400mm) ×5本
アルミクランプホーン ×5個
※アルミクランプホーンは、本体に装着済みです。
Made in Japan
商品説明
B3Mはブラシレスモータや非接触磁気式エンコーダを使用し、高信頼性、長寿命を目指したサーボです。
ケースのトップとミドルにアルミを採用、さらにアルミギヤに硬質アルマイト処理を施した強度の高いギヤを採用することで、高い耐久性を実現しました。
制御プログラムを一新し、高機能で使いやすいシステムを実装しました。PID制御の設定や温度制限や動作電圧制限などの各種リミッターの搭載、分解能は従来の4倍の細かさで指定できます。それらをシンプルな6種類のコマンドだけで制御可能です。
制御は、位置制御、速度制御から選択できます。位置制御では、片側320°の広範囲にわたって角度を指定することができます。また、制御方式も4-1-4多項式補完法など5種類の軌道生成タイプから選択できます。
2018.8.22
![]() ソフトウェアマニュアルをさらに読みやすく再編集しました。こちらからご参照ください。
ソフトウェアマニュアルをさらに読みやすく再編集しました。こちらからご参照ください。
【高信頼性・長寿命ブラシレスモーターを使用】
損耗部品のブラシが無いため長くご使用いただけます。
【高精度12bit磁気式エンコーダーを採用】
非接触磁気式エンコーダーは接触部分がないので長寿命。
さらに12bitの解像度で最小分解能は0.088°(0~4095)
【信頼のRS-485規格】
通信はRS-485規格に準拠しています。差動信号のためノイズに強く、3Mbpsの高速通信が可能。デイジーチェーン接続で最大255個接続可能(理論値)
【6種類の省コマンドでシンプルな構成】
僅か6種類のコマンドのみでサーボの制御が可能です。
メモリーマップドIOを採用しているので、メモリーのデータを読み書きするだけで実際にサーボモーターが動作します。
【マルチキャストコマンド】
サーボごとにID番号を設定できます。また、ID=255はブロードキャストIDとして使用。デイジーチェーン接続された全てのサーボモーターを同時にコマンド実行させることが可能です。
【位置ゲイン、微分ゲイン、積分ゲイン】
位置制御・速度制御時はPID制御パラメーターを調整可能です。また、ゲインプリセット機能を使えば3種類のゲインをあらかじめ登録しておくことができますので、プリセット番号ですばやくゲインを変更することができます。
【システムエラー検知機能・ソフトウェアリミット】
入力電圧やMCU温度、モーター温度、モーターロックなど各種システムエラーをメモリー上に保存しています。また、安全のためのリミット機能を搭載しています。モーターやMCUの温度に対して制限をかけることで、故障の原因を減らすことが可能です。
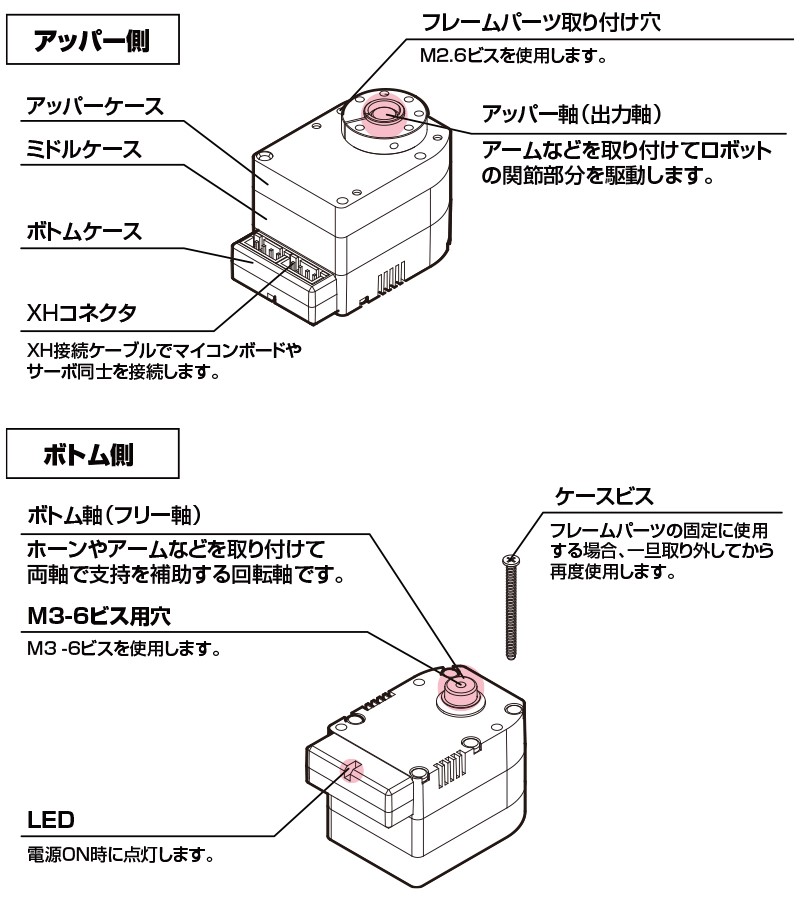
■各部名称
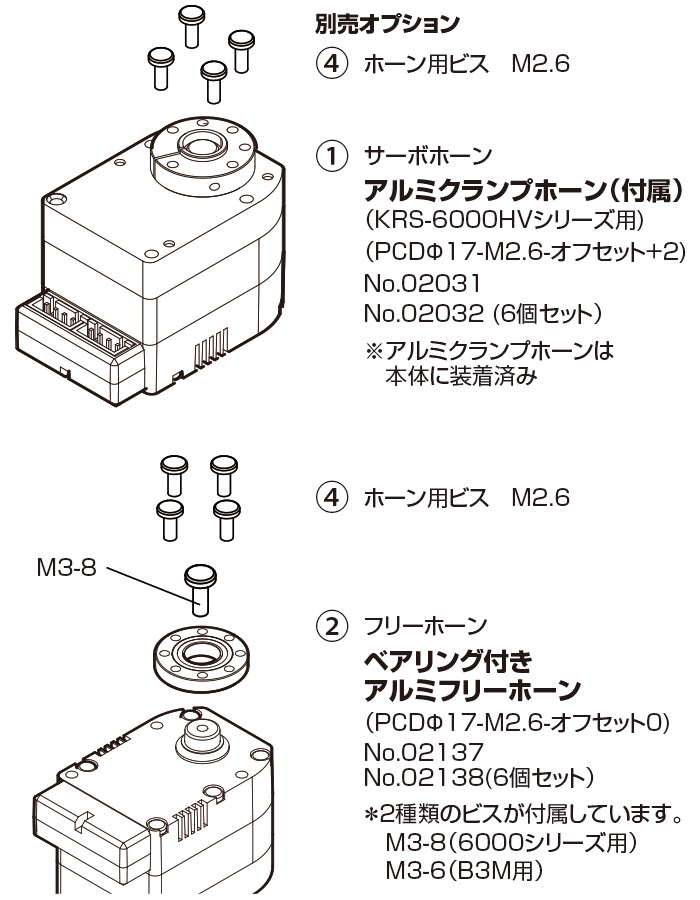
●軸へのパーツ固定
軸にパーツを固定する場合は、ホーンを使用します。出力軸と、フリー軸で対応するホーンが異なりますのでご注意ください。
■制御方法
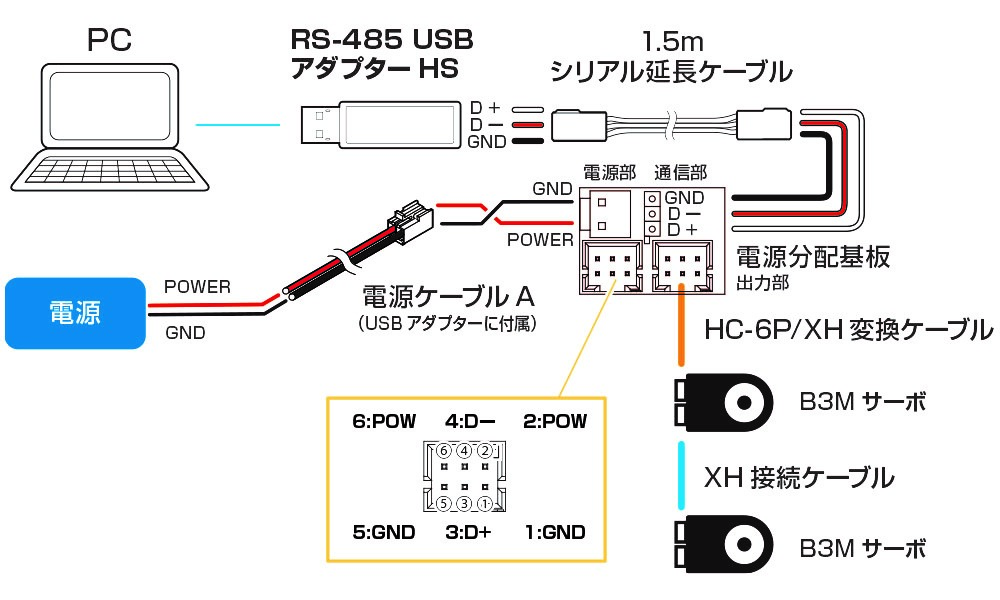
●PC、小型PCボードのUSBから制御する

RS-485 USBアダプターHSを使用することで、PCから直接サーボを制御することができます。公開されているソフトウェアマニュアル(コマンドリファレンス)をもとにコマンドを送信します。通信方法やサンプルも公開されていますので、詳細は下記の記事をご覧ください。
第1回 B3Mサーボモータを動かそう(準備編(1))(改訂版)
第6回 B3Mサーボモータを動かそう(Python編(1))(改訂版)
第7回 B3Mサーボモータを動かそう(Python編(2))
第8回 B3Mサーボモータを動かそう(Python編(3))
第9回 B3Mサーボモータを動かそう(Python編(4))
【制御必要な製品】
・HV電源スイッチハーネス(弊社のバッテリーを使用する場合)
・電源(以下の「電源」をご参照ください。)
※コネクタを合わせるために「HC-6P/XH変換ケーブル(200mm)」が必要になりますのでご注意ください。
【構成図】
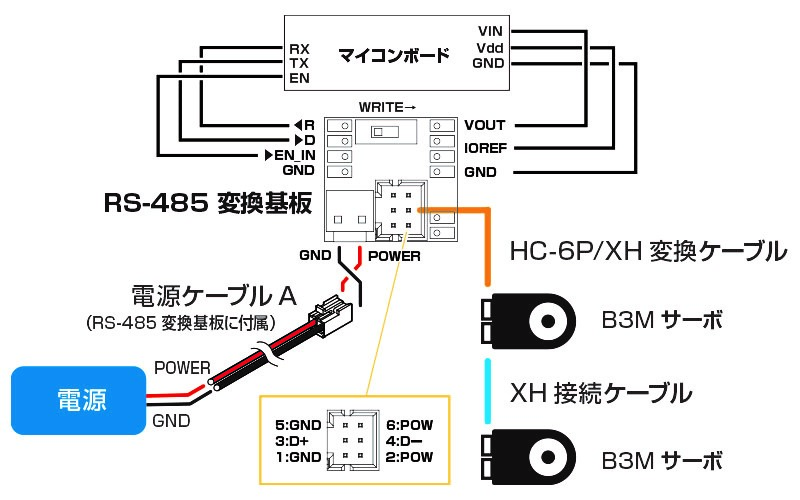
●市販のマイコンボードから制御する
市販ボードのUART端子からB3Mサーボを制御することができます。B3Mサーボはの通信仕様はRS485ですが、RS-485変換基板を中継することでUARTから通信できるようになります。通信方法、コマンドについてはソフトウェアマニュアル(コマンドリファレンス)をご参照ください。
第5回 B3Mサーボモータを動かそう(Arduino制御編)(改訂版)
【制御必要な製品】
・HV電源スイッチハーネス(弊社のバッテリーを使用する場合)
・電源(以下の「電源」をご参照ください。)
※コネクタを合わせるために「HC-6P/XH変換ケーブル(200mm)」が必要になりますのでご注意ください。
【構成図】
●多数のサーボを接続する場合

B3Mサーボは、1つのライン上に概ね5個を目安としています。それ以上の多数のサーボを組み込む場合は「XHコネクター用ハブ typeA」のご利用をお勧めします。※サーボにかかる負荷により接続できる台数は異なります。
●シリアルマネージャー
B3M マネージャーソフトウエアを使用することで、サーボのIDや通信速度を設定することができます。
■電源
B3Mサーボには、3セル(9.9V)のリチウム系バッテリーをご利用ください。弊社ラインナップでは、下記のリチウムフェライトバッテリをご購入いただけます。

【対応バッテリー】
※バッテリーの取り扱いには注意が必要です。こちらの注意事項をよくお読みになってからご利用ください。
【充電器】

【ACアダプター】
アームロボットなど数個のサーボでしたら以下のACアダプターをご利用いただけます。ご利用の際は電流の容量にご注意ください。

■寸法図
フレームの設計用に3D、2Dの寸法図をダウンロードしてご利用いただけます。こちらのページをご参照ください。
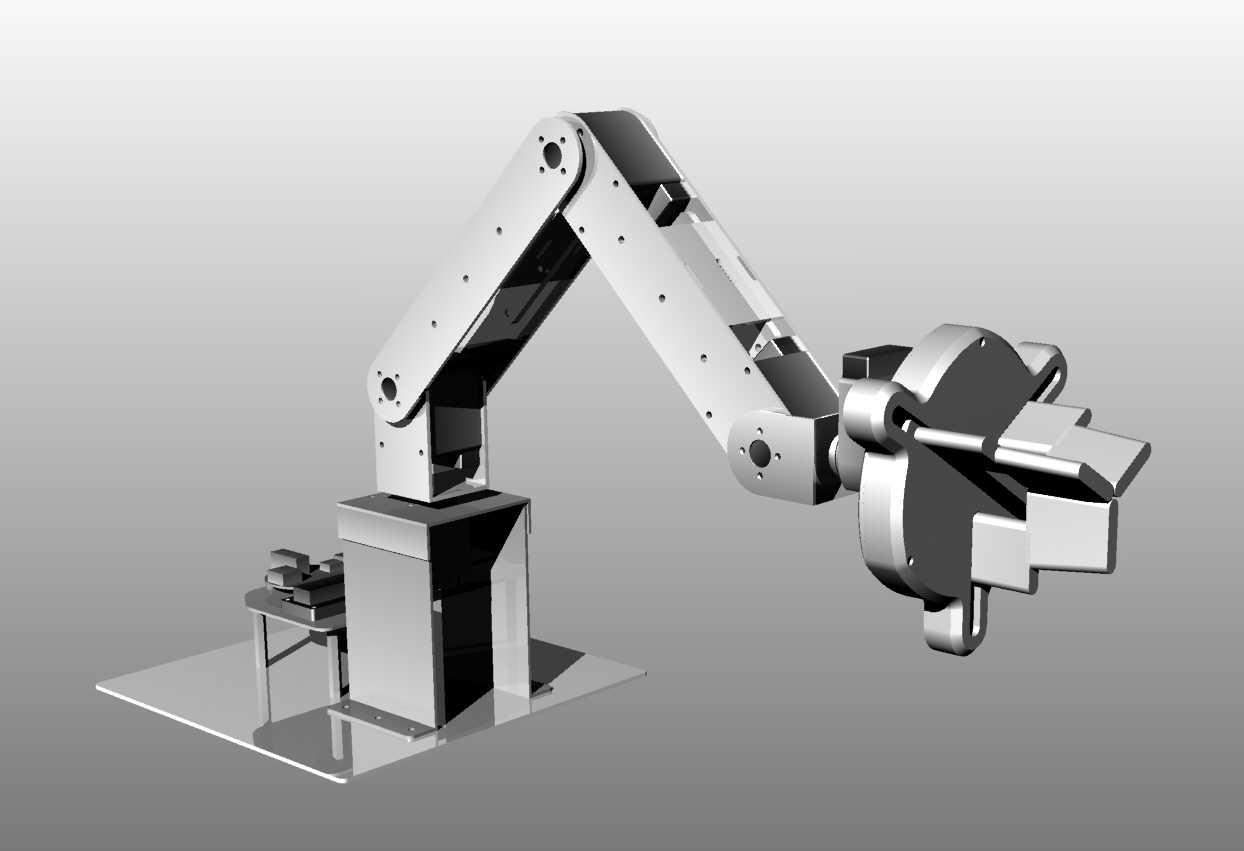
また、参考用にこのサーボを搭載できるアームロボットの設計データを公開しています。組み込みの際の例としてご参照ください。
B3Mサーボに関する情報は、「B3Mサーボ開発資料」にまとめてご用意しています。また、「テクニカルガイド」にもロボットに関する様々な情報を公開していますので、ぜひご参照ください。
B3M-SB-1040-A特徴
・無負荷回転数:45[rpm](0.22[s/60°])
・減速比:362.88:1
・動作電圧:安定した電源で6V~12V
・待機電流:80[mA]
・動作環境温度:0~40[℃]
・重量:86[g]
・寸法:32×32×51mm 寸法図ダウンロード
・最大動作角度:±320[degree](±327.67[degree])
位置制御モード時

・制御分解能:12bit/1round(0~4095)
・動作方式:位置制御、速度制御
・360°無限回転モードはモード切替で使用可です。
■ケース材質
・重量:86 [g]
・寸法:32×32×51mm 寸法図ダウンロード
【ケース】
・トップケース:ジュラルミン
・ミドルケース:ジュラルミン
・ボトムケース:ガラス入り樹脂
【ギヤ】
・ギヤ1:超々ジュラルミン
・ギヤ2:超々ジュラルミン
・ギヤ3:超々ジュラルミン
・ファイナルギヤ:アルミ合金
■制御方式
・位置制御時:PID制御
・速度制御時:PI制御
・モーター:ブラシレスDCモーター
・通信方式:RS-485(半二重通信)
・角度センサー:12 [bit]磁気式エンコーダー使用
・各種リミッター:ロック検知、モーター過電流、動作角度制限、温度制限、動作電圧制限など
・ゲインプリセット機能:PIDゲインを最大3つのプリセットから選択可能
・各種システムエラー検知:各エラー発生時に本体にエラー内容を保持します。
・エラー内容に合わせてステータスLEDが点滅します
・コマンド:シンプルな6種類のコマンドを持ちます
【Load】Flashメモリーに保存されているデータをRAM(メモリーマップ)へ書き出す
【Save】RAM(メモリーマップ)上のデータをFlashメモリーへ保存する
【Read】メモリーマップドIOからアドレス指定でデータを読み取る
【Write】メモリーマップドIOにアドレス指定でデータを書き込む
【Position】複数台のサーボモーターを軌道生成しながら同時に動かす
【Reset】時間を指定してシステムを再起動する
・パラメーター保存機能:本体のFlash ROM領域に各種パラメーターを保存できます
・リセット機能:外部よりリセットを時間指定で掛けることができます
・シングル・マルチキャスト命令:個別のサーボだけでなく、全体あるいは一部に一斉に命令を送ることができる(制限有り)
■通信・パラメーター仕様
・通信形式:RS-485
・転送モード:半二重非同期通信
・通信プロトコル:データ長8bit/スタート1bit/ストップ1bit/パリティ無し
・コマンドシグナル:デジタルパケット
・主なパラメータ:ID番号、各種制限項目、PID制御各種ゲインなど約60種類
・固有ID数:0~254(255はブロードキャストIDとして予約)
・通信速度:最大3Mbps、標準1.5Mbps(ガードタイム200us程度)
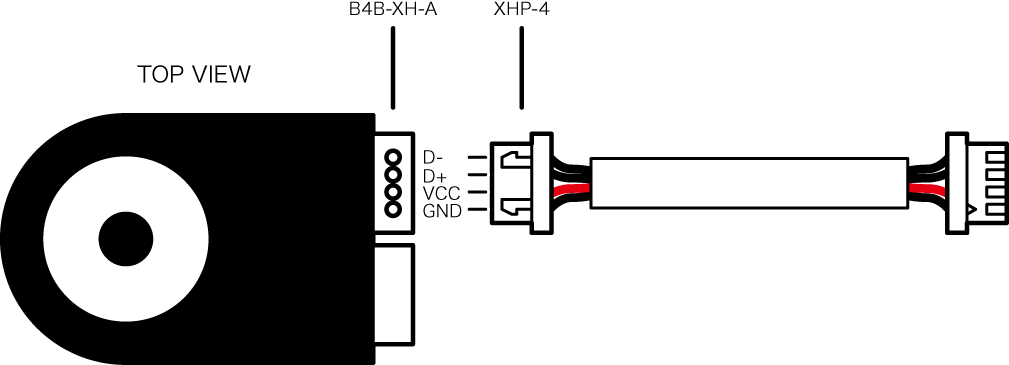
・コネクター
日圧XHP-4 ⇔ B4B-XH-A
1pin GND/2pin Vcc/3pin D+/4pin D-
デイジーチェーン:RS-485ラインを複数台のデバイスで共有できる
本製品は、「RS-485 USBアダプターHS」を使用してPCと、または「RS-485変換基板」を使用してUARTを用いた機器で制御します。詳しくは各商品の商品ページをご覧ください。
※外観、仕様など予告なく変更される場合があります。予めご了承ください。
B3Mシリーズ使い方(B3M-SB-1040-A)
【B3Mサーボモータを動かすために必要なもの】
B3Mサーボモータには、制御用のマイコンとモータを駆動するドライバが内蔵されています。そのため、本体への通信のみでサーボの制御や各パラメータを変更できます。
外部にモータドライバ等別途用意する必要はありません。
必要なものは、「PC通信を行うためのUSBアダプタ、ケーブル」と「サーボモータを駆動するための電源」のみです。
※サーボとUSBアダプターを接続するためのケーブルは本体とセットになっています
USBアダプターには、USB端子のほか、マイコンから通信するためのUART端子も備えています。
※USBケーブルは別売です。PCから通信する場合は、市販のA⇔miniBタイプのケーブルをご用意ください。
・電源(6~12V:12V推奨)
容量は接続するサーボの数と制御内容によりますが、5個前後で5A必要です。
USBアダプターに電源端子がありますので、こちらからサーボに電源を供給することが可能です。
常に負荷がかかったり俊敏な動作をさせる場合は、モータのストール電流(最大電流)をご確認ください。
【接続方法】
サーボ同士を接続するマルチドロップ接続が可能です。一つのラインに7、8個までつなぐことができます。

数十個接続する場合は、ハブを使用してください。
B3Mを制御するまでの準備については、以下のサポート記事に詳しく紹介されていますのでこちらをご参照ください。
■サポート記事『B3Mサーボモータを動かそう(準備編(1))』
【制御方法】
PCまたは、マイコンからUSBアダプター経由でコマンドを送り制御します。
制御するために必要なコマンドは6つのみです。
<LOAD>
ROMの内容をIOマップ(RAM)に読み出します。
<SAVE>
IOマップ(RAM)の内容をROMに保存します。
<READ>
IOマップ(RAM)のアドレス指定でデバイスからデータ(RAM)を読み込みます。
<WRITE>
IOマップ(RAM)のアドレス指定でデバイスにデータ(RAM)を書き込みます。
<RESET>
デバイスを再起動します。
<POSITION>
サーボモータの動作角を指定します。
PCからB3Mサーボモータへアクセスするコマンドは少ないのですが、これらのコマンドをより簡単にプログラムできるよう、ライブラリを作成し無償配布しています。以下からダウンロードしてご利用ください。
また、コマンドの作成や制御パラメータについての情報は、ソフトウェアマニュアルに全て記載されています。
制御方法の詳細に関しましては、以下のサポート記事をご覧ください。
■サポート記事『B3Mサーボモータを動かそう(C#下準備編)』
■サポート記事『B3Mサーボモータを動かそう(C#位置制御編)』
【サーボの組み込みについて】
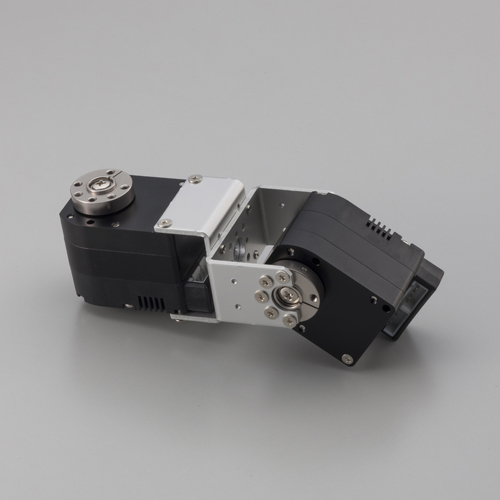
サーボの組み込みに便利なフレームを各種ラインナップしています。これらを使用することでニーズに合った形に組み合わせることが可能です。
※B3M-1000シリーズのケースサイズに合わせたフレームです。B3M-SC-1170-Aには使用できません。
・サーボアーム【B3M-1000シリーズ用】(2セット入り)

・サーボブラケットS【B3M-1000シリーズ用】(2セット入り)

・サーボブラケットB【B3M-1000シリーズ用】(2セット入り)

■使用例


独自にフレームを開発するための寸法図も公開しています。
【搭載例】
B3Mサーボを使用したアームロボットの情報を公開しています。設計データをダウンロード可能ですので開発の参考にご利用ください。
関連するオプション
-

RS-485 USBアダプターHS
コード: 03225 ¥4,950 (税込)RS-485通信規格対応の機器とPCをUSB経由で通信するための変換アダプタです。PCのUSBの信号をRS-485通信規格に合わせた信号に変換することができます。
-
RS-485変換基板
コード: 03226 ¥2,530 (税込)RS-485通信規格対応の機器とマイコンボードが通信するための変換アダプタです。マイコンボードのシリアル端子(TX/RX)の信号をRS-485通信規格に合わせた信号に変換することができます。
-

HC-6P/XH変換ケーブル(200mm)
コード: 02256 ¥1,320 (税込)PMXシリーズに採用されている6ピンコネクタからB3Mシリーズの4ピンコネクタへ変換するためのケーブルです。
-

ケースビスセット(M2.6-16/30)(5セット入り)
コード: 02263 ¥770 (税込)PMX-5200シリーズ、KRS-5000シリーズ、B3M-1000シリーズ標準のケースビスセットです。
-

M3-8ホーン止めビス(ワッシャーヘッドタイプ)
コード: 02175 ¥550 (税込)B3M/KRS-6003標準のホーン止めビス。ヘッドにワッシャー状の加工が施されており、既存のフラットヘッドビスタイプよりしっかりと固定することができます。
-

サーボアーム【B3M-1000シリーズ用】(2セット入り)
コード: 02150 ¥3,300 (税込) -

サーボブラケットS【B3M-1000シリーズ用】(2セット入り)
コード: 02151 ¥3,300 (税込) -

サーボブラケットB【B3M-1000シリーズ用】(2セット入り)
コード: 02152 ¥3,300 (税込) -

XH接続ケーブル 400mm
コード: 02144 ¥1,100 (税込)B3Mシリーズ対応の接続ケーブルです。
ノイズに強いツイストペアケーブル仕様です。 -

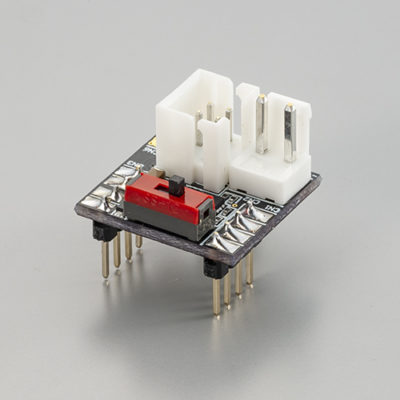
XHコネクター用ハブ typeA
コード: 02136 ¥2,750 (税込)B3Mシリーズに対応するXHコネクターのハブです。ハブ用の端子が5つ実装されています。電源スイッチも実装済みです。
-

ベアリング付アルミフリーホーン(B3M/KRS-6000シリーズ用)
コード: 02137 ¥1,320 (税込)ベアリング装備でスムーズな両軸支持。高精度、高剛性のアルミフリーホーン。B3M・またはKRS-6000シリーズのボトムケースにある軸に固定して使用します。
-

サーボ用4本ケーブルセット【3m】
コード: 02135 ¥1,100 (税込)XH接続ケーブルのケーブルセットです。
ケーブルをお好みの長さで製作する際にお勧めです -

XHケーブル用コネクターセット(30セット入り)
コード: 02134 ¥1,650 (税込)XH接続ケーブルのコネクタとピンのセットです。
ケーブルをお好みの長さで製作する際にお勧めです。 -

アルミクランプホーン(KRS-6000HVシリーズ用)
コード: 02031 ¥1,320 (税込)強固な保持力を発揮するアルミ性クランプホーン。 挟み込んで軸に固定するため通常のホーンに比べて保持力がアップします。KRS-6003HVに付属しています。スペアやメンテナンス用におすすめ。B3M-1000/1100にも対応しています。