
KXRシリーズにArduino UNOを搭載する
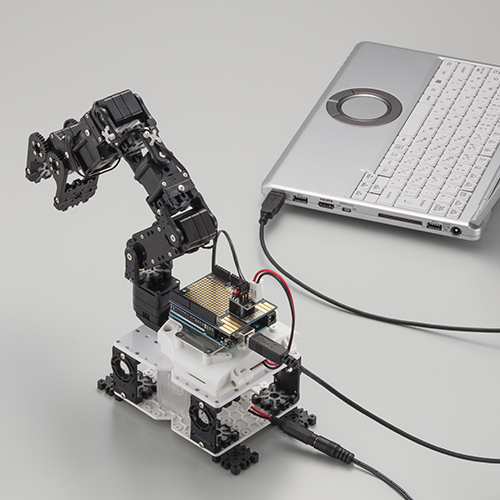
KXR用オプションボード搭載セットAを使用することで、KXRのバックパックにArduino UNOを搭載することが可能です。
今回は、KXR-A5 アーム型を例に搭載方法をご紹介します。
■使用する製品

・KXRプログラミング学習用シールドセット(Arduino用) ×1
(どちらのセットも搭載方法は同じです)
Arudino UNOをKXRシリーズのバックパックに搭載するための板金と、ビス、ケーブルのセットです。ICS変換基板、シールドも一式付属しますのでArduino UNOをご用意いただければすぐに開発を始められます。
※ICS変換基板、シールドははんだ付けが必要です。詳細は下記の記事をご参照ください。
本製品の他に下記をご用意ください。
・KXR-A5 アーム型(使用例)
バックパックを寝かせて搭載するロボットでしたら搭載可能です。
(例:KXR-L4T、KXR-L6、KXR-R4LLなど)
・Arduino UNO
・PC(Arduinoが動作可能な環境)
・USBケーブル(PCとArduinoの接続用)
※ACアダプター、スイッチハーネスなどはKXR-A5に付属しているものを使用します。
■搭載方法
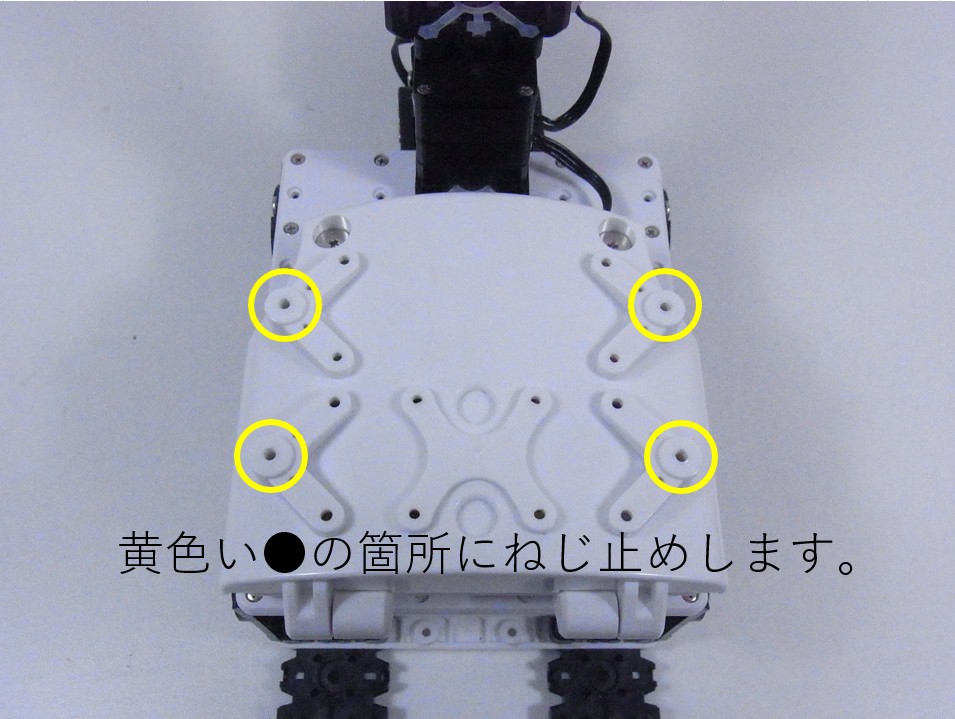
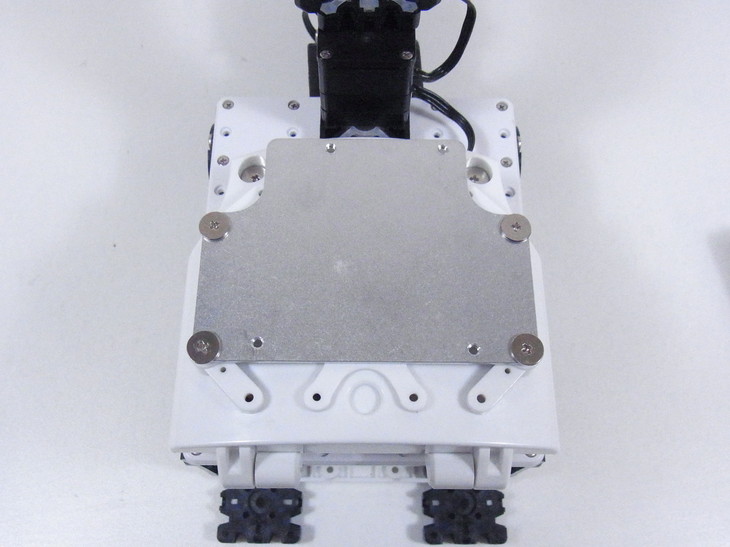
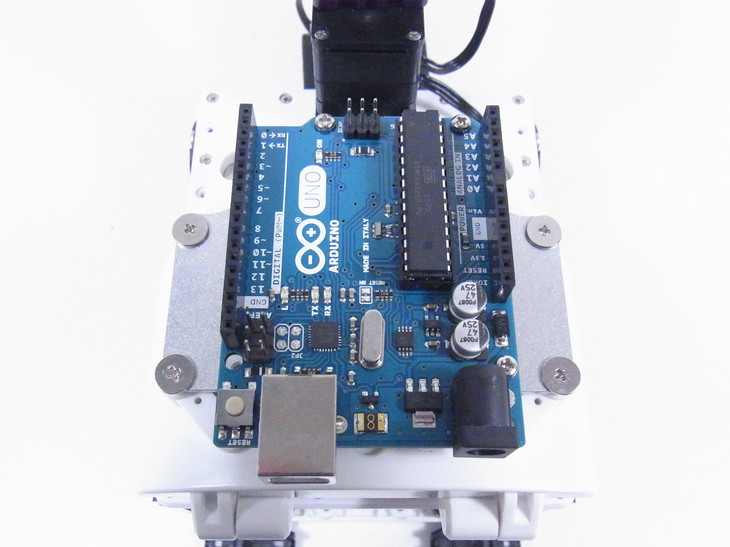
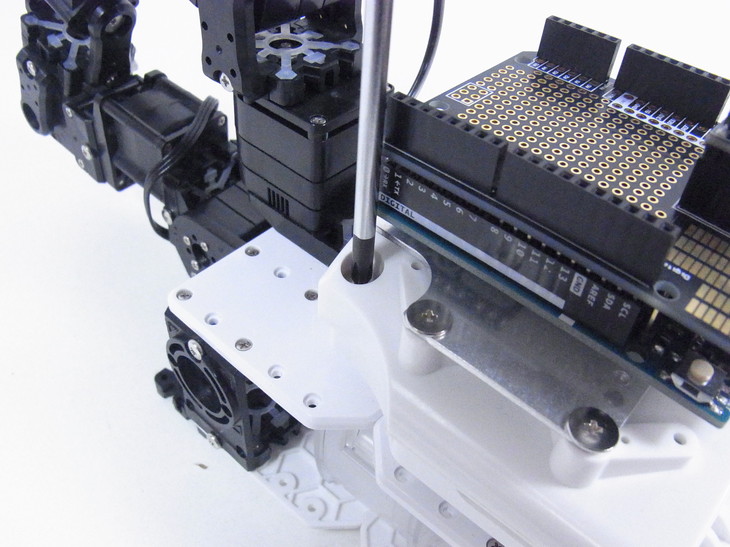
1)バックパックに2.6-4ビスで板金を固定します。
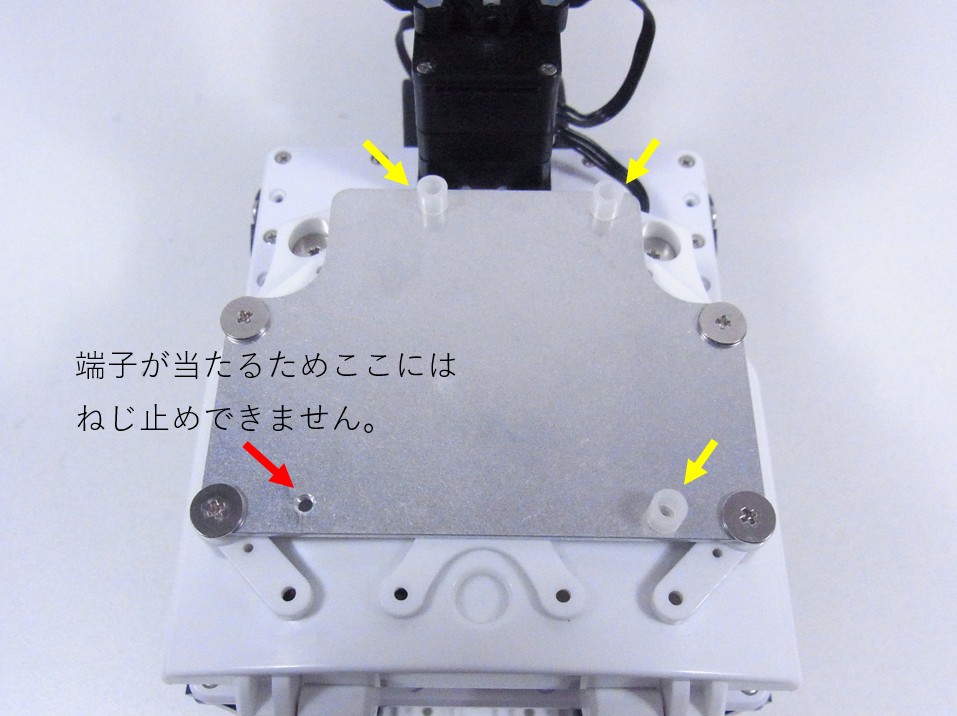
2)Arduino UNOをスペーサーを挟んでM2.6-8ビスで板金に固定します。
3)Arduino UNOにシールドとICS変換基板を接続します。
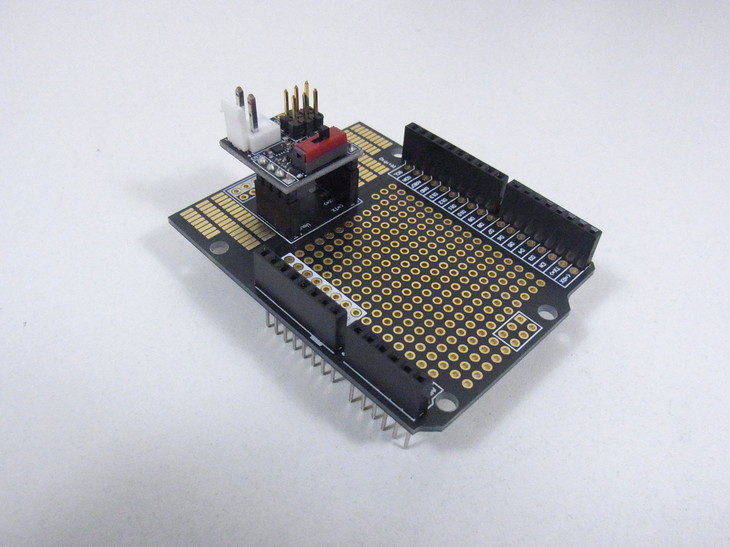

※写真は各基板にピンヘッダーを半田付けした状態です
4)バックパックの開閉を固定している2.6-4ビスを外し、バックパックを開きます。
5)RCB-4miniに接続されている電源端子を外し、電源延長コードを接続します。
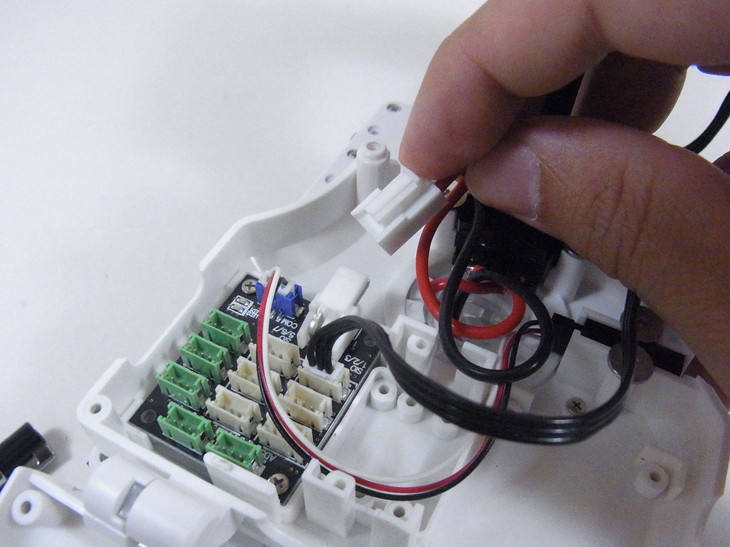

6)電源延長コードの反対側は、ICS変換基板の電源端子に接続します。電源延長コードはバックパックのヒンジの隙間から外に出します。
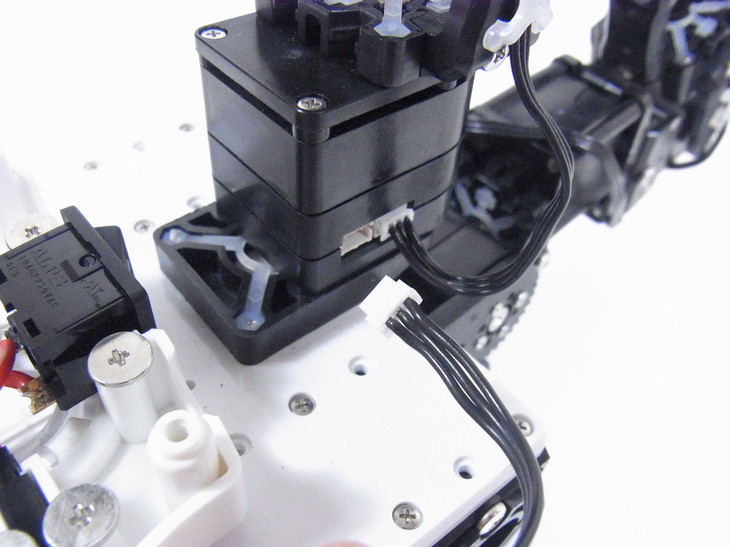
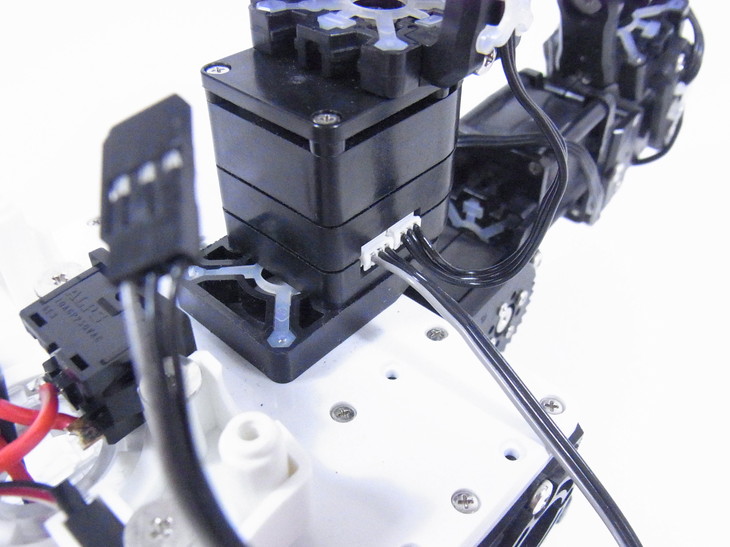
7)アーム本体のID1に接続されているケーブルを外し、代わりにZH接続ケーブルB(200mm)を接続します。RCB-4mini側も取り外してください。
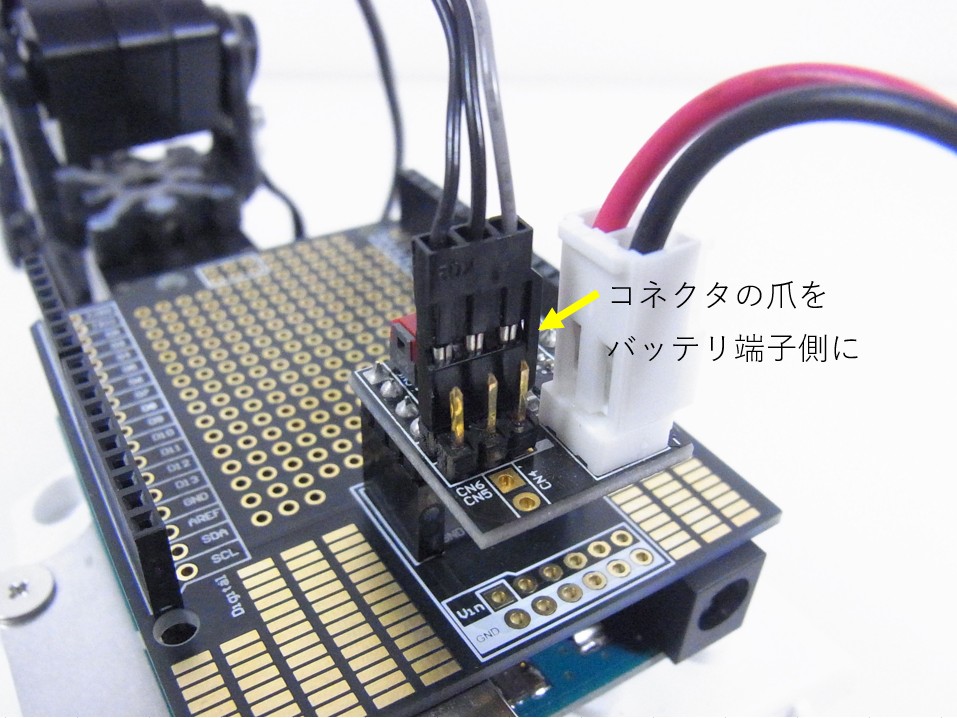
6)ID1のZH接続ケーブルBをICS変換基板の端子に接続します。コネクタの爪がある方を電源端子側に向けてください。
※極性を間違えるとサーボが破損する可能性がありますので接続方向には十分ご注意ください。
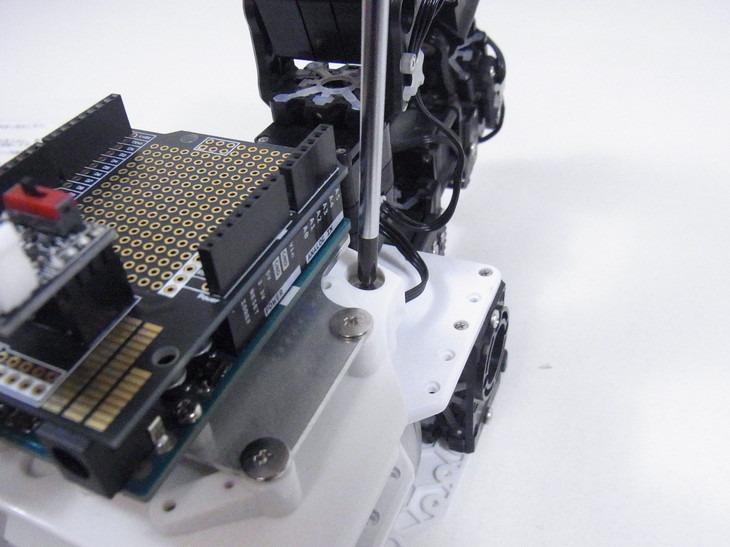
7)最後にバックパックの開閉を2.6-4ビスで固定して完了です!
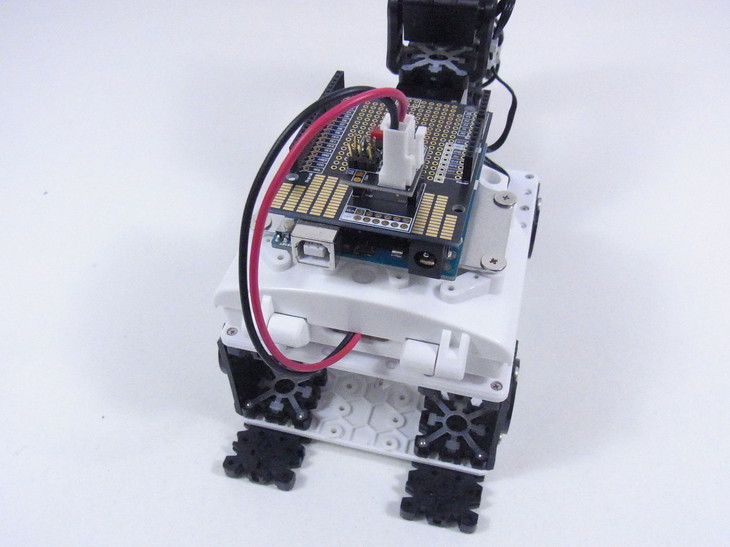
完成するとこのようになります。

バックパックを寝かせて固定しているカメ型、ローバー型などは同じように固定することが可能です。Arduinoを簡単に固定でき、電源スイッチも共用で使えますので開発が楽になります。
ぜひお試しください!
【付録】
●ICS Library for Arduino ver.2
ArduinoにてKRSサーボを使用するためのライブラリです。
ICS変換基板のご利用方法を解説しています。
●RCB-4 Library for Arduino ver.1
ArduinoからRCB-4を制御するためのライブラリです。
●RCB-4変換基板の使用方法(3) Rcb4MotionPlay編
カメ型・ローバー型のロボットに学習用シールドを搭載して、簡単な自律ロボットを作成するためのマニュアルとサンプルプログラムをダウンロードできます。