HeartToHeart4講座(3-1) ロボットの姿勢と作成ルール
今回の記事よりHeartToHeart4講座の第三章に入ります。この章では、サンプルプロジェクトの中で1からモーションを作成する方法をご紹介します。
第三章の1回目の記事は、ロボットの姿勢(ポジション)と、モーションを作成するときのルールについて解説します。
【関連記事】
第一章、第二章については下記のページからご参照ください。
■モーション作成の流れ
HeartToHeart4では、コントロールとよばれる多彩な機能を持ったブロックを並べ、繋げながらモーションを作成していきます。以下の画像は、KXR-L2「挨拶」モーションです。

「Pos」は、サーボの全身の角度を指定するコントロールです。Pos一つひとつにポーズを入れ、繋げて再生することで、ロボットがお辞儀をすることができます。
モーション最後の「ホームポジション」は、以下で解説するホームポジションの姿勢になるためのPosコントロールです。「ホームポジション」というコントロールはありません。わかりやすいようにPosの表記を変更し、ブロックの横幅を拡げています。
■ロボットの姿勢(ポジション)の種類
HTH4では、ロボットは用途に合わせて3種類の姿勢があります。
ホームポジション
第二章では、サンプルプロジェクトでロボットのモーションを再生しました。ロボットの電源を入れた後、モーション再生の指示があるまでロボットは待機状態になっています。この時、トリムで調整した姿勢とは違い、肘や膝を少し曲げた姿勢になっていたことに気づきましたでしょうか?
サンプルプロジェクトでは、ロボットが待機状態の時に、動き出しやすい姿勢で待機するように設定されています。この待機状態の姿勢を「ホームポジション」とよびます。
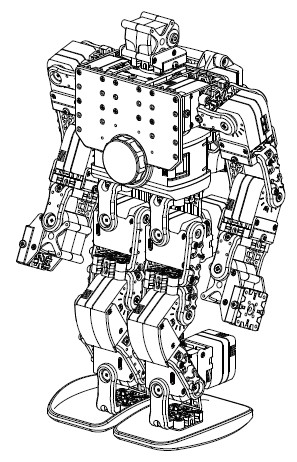
二足歩行ロボットでは、肘と膝を少し曲げた状態をとることが多いですが、ホームポジションは動き出しやすい姿勢であれば、ユーザーのお好みで作成しても問題ありません。ホームポジションを独自に作成し、ロボットに個性を与えるのもモーション作りの醍醐味だと思います。
ただし、一度作成したホームポジションを途中で変更することは難しいです。モーションを多数作成していくと、モーションによってはホームポジションの変更によりバランスに影響が出る可能性があります。ホームポジションは、できるだけ最初に固定しておくようにしましょう。
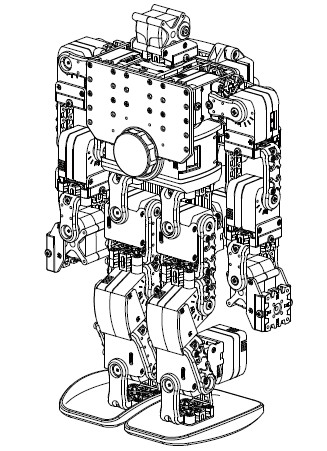
トリムポジション
トリム調整をするときは、腕と脚をまっすぐに伸ばした方が左右のバランスを確認しやすくなります。このトリムを調整するための姿勢を「トリムポジション」とよびます。
トリムポジションで設定した数値が、Posコントロールの0地点になります。そのため、モーションの作成途中でトリムを変更すると、全てのモーションの0地点が変わってしまいます。モーションを作成する前に、しっかりとトリムを調整しましょう。また、サンプルモーションを再生し、安定しているかバランスを確認してください。
ニュートラルポジション
前身の関節(サーボ)が動作角の中心(0地点、ニュートラル位置)にある状態を「ニュートラルポジション」とよびます。
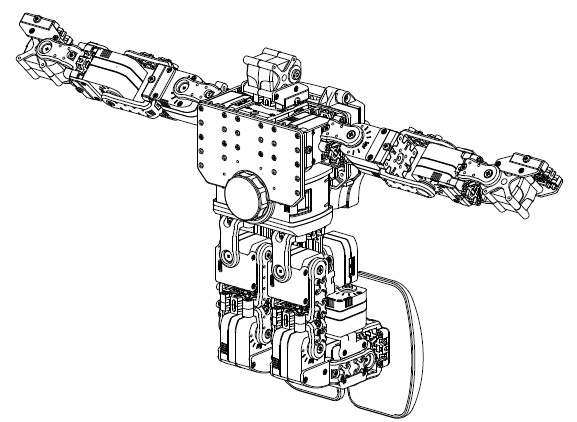
二足歩行ロボットではほぼ使用しませんが、ロボットの形状によってはニュートラルポジションをトリムポジション、ホームポジションとする場合があります。
■モーション作成のルール
モーション作成は、基本的にユーザーの自由です。こうしなくてはいけない、というルールは一切ありません。しかし、やみくもに作ってしまうと転倒しやすくなり、故障の原因になりますので、安定してロボットを動かすために下記のルールをお伝えします。
1.モーションの最後は「ホームポジション」で終わらせること
先ほど解説した通り、サンプルプロジェクトを入れたロボットは、待機状態の時にホームポジションになります。これは、全てのモーションの最後にホームポジションのPosコントロールを入れているためです。一連の動作が終わった後にホームポジションを再生することにより、常に同じ姿勢で終わり、次のモーションもホームポジションの姿勢から始めることができます。
もし、モーションがホームポジションで終わらなかった場合はどうなるのでしょうか。例えば、「喜ぶ」を再生した後に、ホームポジションに戻らず股関節を拡げた状態のままモーションが終わってしまったとします。次に「前進歩行」を再生したときに、股関節が開いたまま歩行を開始しますが、本来は閉じた状態で歩行を始めますので、動き出しでバランスが崩れてしまいます。ロボットの転倒は、故障の原因にもなりますので、なるべく安定したモーションが再生できるように同じ姿勢で終わり、常に同じ姿勢から始まるように作成しましょう。
2.重心位置を意識すること
歩行しながら移動するロボットは、重心位置を変えながらバランスをとっています。重心位置が過剰に傾いてしまうと転倒しますので、片足を上げたときや、体を傾けたときなど、重心位置がどこにあるのかを意識して作業してください。
3.関節をロックしないこと
ロボットの関節に使用しているサーボは、ロック状態が続くとモータが破損してしまいます。ロック状態とは、軸が固定され負荷がかかっている状態を指します。例えば、片足のみで立ち続けると、軸足に負荷がかかりますので、ロック状態になりサーボが破損する原因になります。
また、関節の動作が可能な範囲を超えて、ボディーや隣の脚に接触した状態が続くと、ロック状態になり破損する可能性があります。
ロボットに無理な姿勢が続いていないか、また接触していないかを確認しながら作業を進めてください。
以上です。
今回は、解説の回になりますが、モーション作りには重要な内容になりますので、こちらの内容をよく覚えてください。
次回から、モーション作成作業を開始します。
次の記事
HeartToHeart4講座(3-2) 教示機能でモーション作成1
HeartToHeart4の詳細をみる KHR-3HV Ver.3.1 リフェバッテリー付きセットの詳細をみる KHR-3HV Ver.3 リフェバッテリー付きセットの詳細をみる RCB-4HVボードのみの詳細をみる RCB-4miniの詳細をみる KHR-3HV Ver.2 リフェバッテリー付きセットの詳細をみる KXR-L2 ヒューマノイド型 Ver.2の詳細をみる KXR-L4T-R カメ型・ローバー型 Ver.2(アカデミックパック)の詳細をみる KXR-A5 アーム型 Ver.2の詳細をみる KXR アドバンスセットA Ver.2の詳細をみる KXR アドバンスセットB Ver.2の詳細をみる