Archives
KXR用オプションボード搭載セットA 製品マニュアル
KXR用オプションボード搭載セットAに付属する製品マニュアルを公開します。 KXR-Option-Board-set_kitguidance_V1_0.pdf ...
もっと見るICS変換基板の使用方法(3) 無線コントロール編

【関連記事】 ICS変換基板の使用方法(1) 準備編 ICS変換基板の使用方法(1) 準備編(R4改訂版) ICS変換基板の使用方法(2) サーボ制御編 ICS変換基板の使用方法(2) サーボ制御編(R4改訂版) ICS変換基板の使用方法(4) ID読み書き編 ICS変換基板の使用方法(4-2) ID読み書き編(番外) ICS変換基板の使用方法(5) Arduino Nano EveryでKRSサーボを制御 前回までの記事では、ICS変換基板を使用してサーボの制御を行ってきましたが、今回は無線コントロールのご紹介です。 Arduino向けライブラリには無線コントローラKRC-5FHの受信機であるKRR-5FH用の関数が用意されていますので、接続することでArduinoを簡単にボタン操作による無線コントロールを行うことができます。 今回は、KRC-5FH&KRR-5FHの搭載方法とプログラムを解説します。 ■KCR-5FH&KRR-5FHとは KRC-5FHは、ロボット用無線コントローラです。KXRシリーズやKHRシリーズに受信機KRR-5FHを搭載することによって、ロボットを無線コントロール...
もっと見るICS変換基板の使用方法(2) サーボ制御編
【関連記事】 ICS変換基板の使用方法(1) 準備編 ICS変換基板の使用方法(3) 無線コントロール編 ICS変換基板の使用方法(4) ID読み書き編 ICS変換基板の使用方法(4-2) ID読み書き編(番外) ICS変換基板の使用方法(5) Arduino Nano EveryでKRSサーボを制御 前回の記事に続きまして、今回はICS Library for Arduinoに付属するサンプルプログラムを利用して簡単なサーボの制御を行います。 ■プログラム解説 ここからArduino用のプログラム環境であるスケッチを使用します。 『ICS Library for Arduino ver.2』に付属するサンプルプログラムの「KrsServo1」を改造して二つのサーボを制御するプログラムを行います。 まずは、サンプルのままのID0を動かすプログラムをご紹介します。 サンプルプログラムは、「ファイル」→「スケッチ例」→「IcsClass_V200」から開くことができます。 最初に記述されている下記の内容は、ICS機器と通信するための初期設定です。HardwareSerial、S...
もっと見るICS変換基板の使用方法(1) 準備編
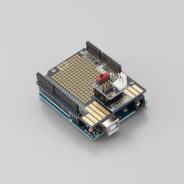
ICS変換基板は、マイコンボードなどに搭載されているUART端子、またはI/O端子のソフトウェアシリアルを使用してサーボモータなどICS機器と通信するための変換基板です。 従来は、ICS機器とマイコンボードを中継する回路を作成する必要がありましたが、この基板を使用することで簡単に制御することができるようになります。 ●ICS機器とは ICSは近藤科学独自のデバイスやマイコンボード間で使用する通信規格です。この通信規格を採用した製品をICS機器と呼称しています。製品としては、サーボモータ、無線コントローラの受信機があります。以下の解説では、ICS機器はサーボに該当します。 今回は、ICS変換基板の使用方法の例として、このICS変換基板とKSBシールド2を組み合わせ、Arduino UNO R3でサーボを制御する方法をご紹介します。 Arduino UNO R4をご利用される場合は『ICS変換基板の使用方法(1) 準備編(R4改訂版)』をご参照ください。 【関連記事】 ICS変換基板の使用方法(2) サーボ制御編 ICS変換基板の使用方法(3) 無線コントロール編 ICS変換基板の使用方法(4) ID読み書き編 I...
もっと見る