
KXR アドバンスセットB Ver.2
価格: オープン
販売中
<キット内容>
●強化樹脂パーツ
●コントロールボードRCB-4mini
●サーボモータ
・KRS-3302 ICS ×18
●ROBOパワーセル Eタイプ
6N-800mAh Ni-MH
●充電器BX-32MH
●Dual USB アダプターHS
●ケーブル、ビス類
<ソフトウェア動作環境>
●対応OS/Windows 8.1 / 10 / 11
●USBポート(1.1/2.0)
※使用する.NETのシステム要件を満たすこと。
【ダウンロード資料】
下記のボタンから最新の取扱説明書、ソフトウェアをダウンロードすることができます。

Made in Japan
商品説明
【多彩なロボットを組み立てられるフルセット】
本セットでは、6脚型や恐竜型ロボットをはじめ、ヒューマノイド型のグリッパーハンド付き仕様などを組み立てられます。さらに、KXRシリーズすべてのパーツが揃っていますので独自に組み換えてオリジナルロボットを完成させることもできます。
★Ver.2のポイント:組立可能な作例が増えました!
Ver.1から付属パーツが増えましたので、組換の幅が広がりました。





■組み立てられるロボットの作例
下記のリンク先からVer.2対応の組立説明書をダウンロードできます。
【標準サーボにKRS-3302 ICSを採用】

KRS-3302 ICSは、キューブタイプデザインの小型サーボです。樹脂ギヤ、コアードモータを採用し手軽な価格帯でありながら、スムーズな動作と程よいトルクを実現しました。
★Ver.2のポイント:KRS-3301が3302にリニューアル!
KRS-3302は、KRS-3301に比べてパワフルなモータを採用しています。特に変わった点は保持力です。3302は、保持力が高まったことにより、より安定したモーション再生ができるようになりました。二足歩行ロボットの歩行や起き上がりモーションでその差を実感いただけます。
また、ハンチング(サーボの軸が振動する現象)が起こりにくくなりなりました。
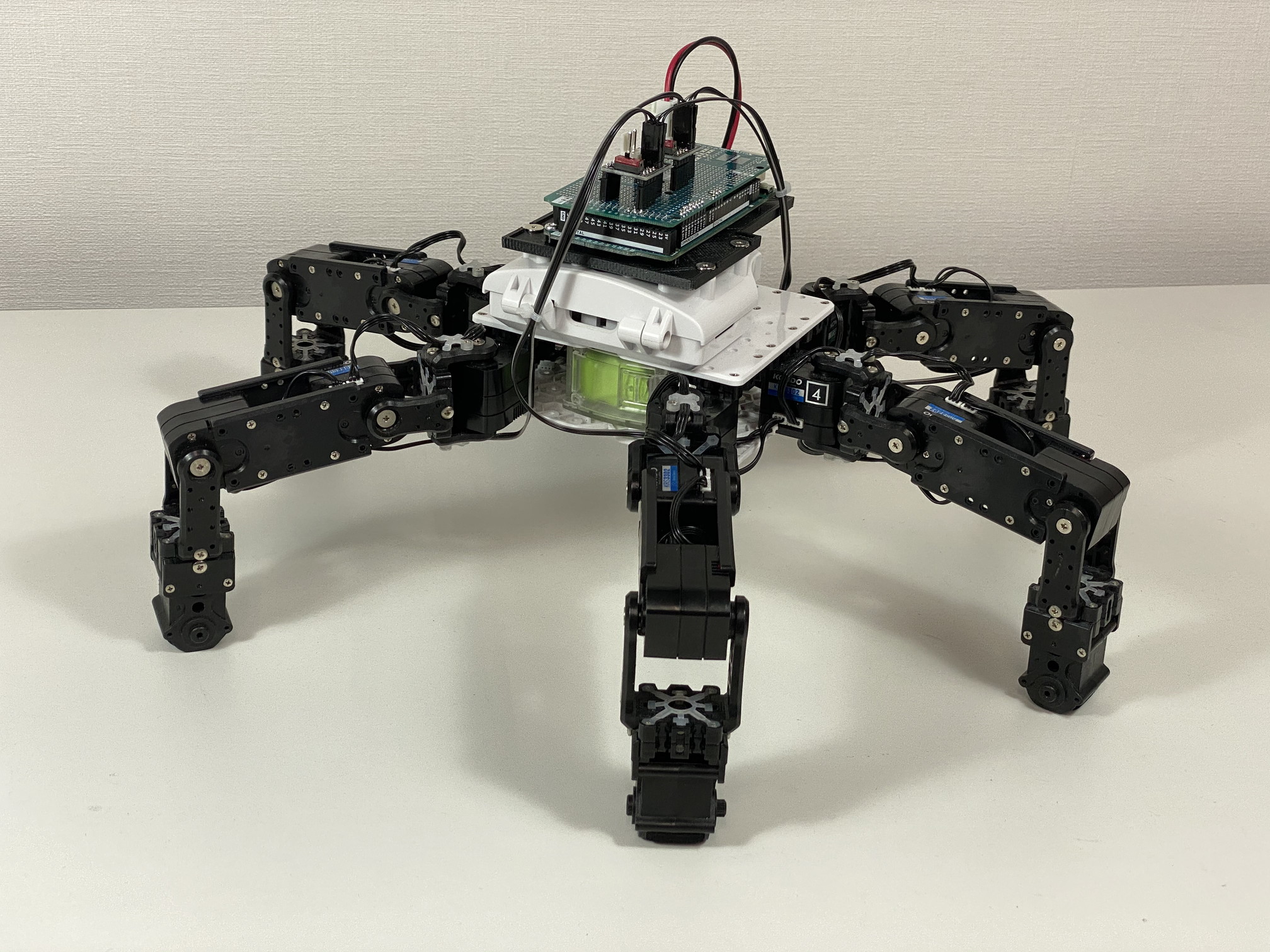
【Arduinoを搭載してプログラミング】
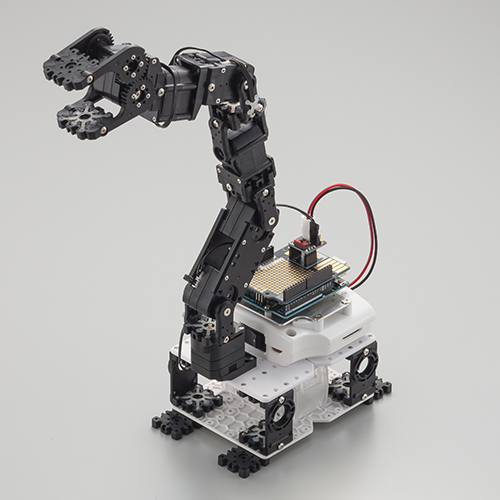

別売のKXR用オプションボード搭載セットを使用することにより、KXRのバックパックにArduino UNOを固定することができます。ICS変換基板やRCB-4変換基板、シールド、ケーブルやビスも付属します。
・KXR用オプションボード搭載セットC(RCB-4変換基板)
・KXRプログラミング学習用シールドセット(Arduino用)
※KXR-L2などヒューマノイド型には対応していません。
※Arduino、及び各搭載セットは本セットに付属していません。
Ver.2の進化の詳細はこちらの記事をご参照ください。
【アドバンスセットAとの違い】
アドバンスセットAでは、KRS-3302 ICS×12個の他にハイトルクサーボKRS-3304R2 ICS×6個で合計18個のサーボが付属していますが、本キットには、全てのサーボがKRS-3302 ICSとなっています。
その他、パーツ、コントロールボードなどセット内容に変更はありません。
アドバンスセットBは、標準サーボのみとすることで価格を抑えて様々なロボットにチャレンジできるお得なセットです。
【作成例:1 KXR-L6 6脚型】
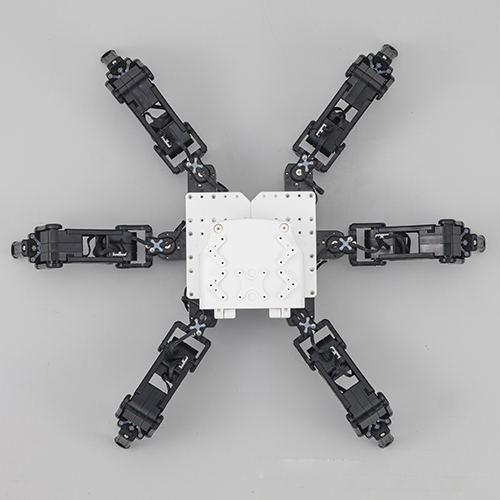

■軸数:18軸(3302:18個)
■サイズ:401(H) x 198(W) x 249(D)mm
■重量:1,060g
6本足の多脚ロボットです。各足に3個サーボを使用しています。平坦な基本ポジションから高姿勢状態に変換することが可能です。6本の足で非常に安定した歩行動作が可能になっています。
Arduino MEGAからKXR-L6に搭載された全身のサーボを制御する方法を公開しました。
『ICS変換基板の使用方法(6-1) Arduino MEGAで18個のサーボを制御する』
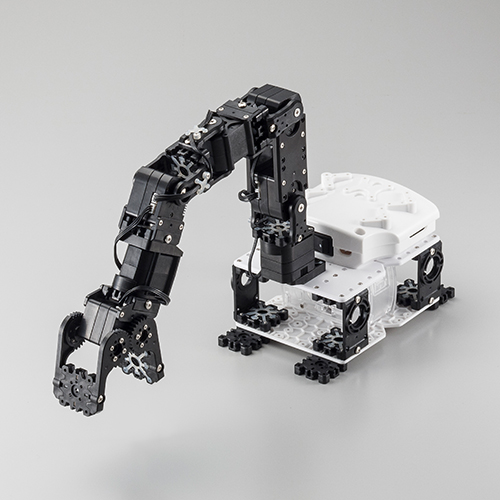
【作成例:2 KXR-L4D 恐竜型】




■軸数:18軸(3302:18個)
■サイズ:79(H) x 524(W) x 455(D)mm
■重量:約1,180g
4本足の恐竜型ロボットです。セット内容では、首の上下軸とハンド部の2軸が稼働しますので、ものを掴んで運ぶことが可能です。
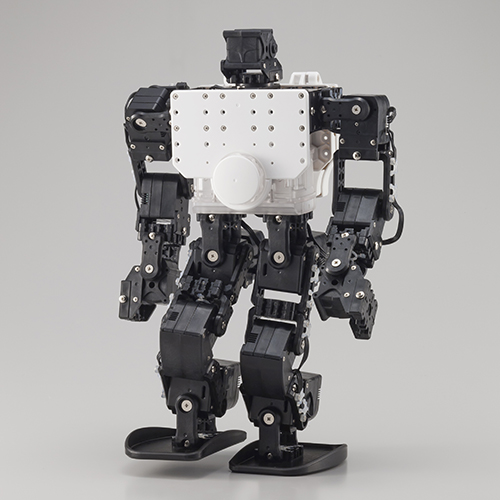
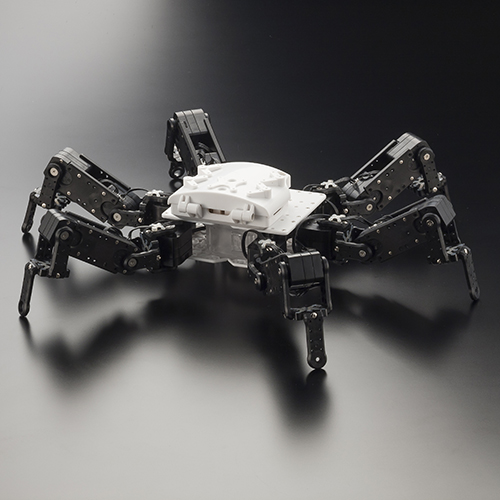
【作成例:3 KXR-L2G ヒューマノイド型ハンド付き】

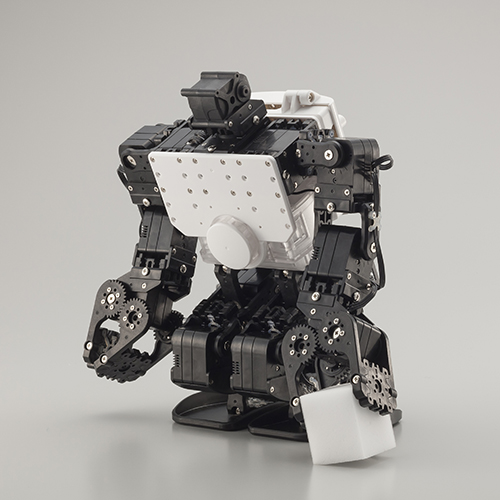
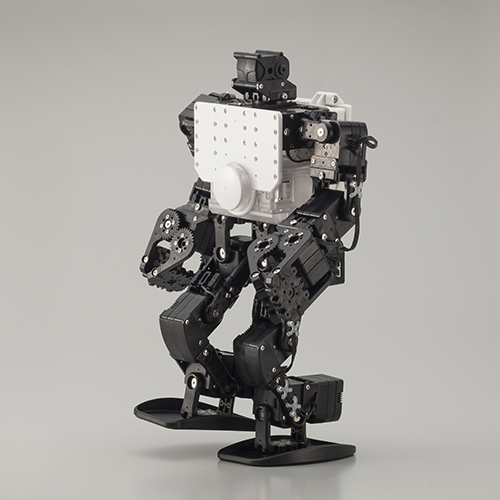
■軸数:18軸(3302:18個)
■サイズ:295(H) x 224(W) x 107(D)mm
■重量:約1,220g
KXR-L2にグリッパーハンドを搭載した仕様です。ハンドが開閉しますので軽いものを掴んで運ぶ動作が可能になります。本セットではKRS-3302のみとなっていますので、オプションのジャイロセンサーKRG-4と組み合わせて歩行を安定させることをお勧めします。
※高高速モーションを再生するためには、アドバンスセットAと同様に脚部をKRS-3304R2に換装する必要があります。
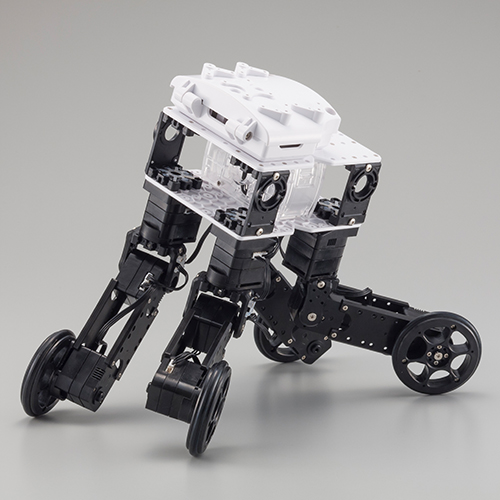
【作成例:4 KXR-R4LL ローバーLL型】
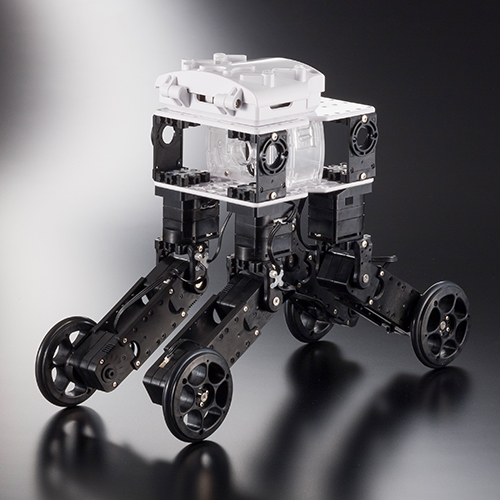
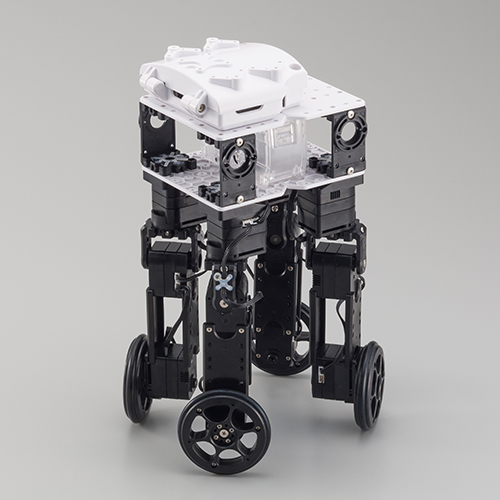
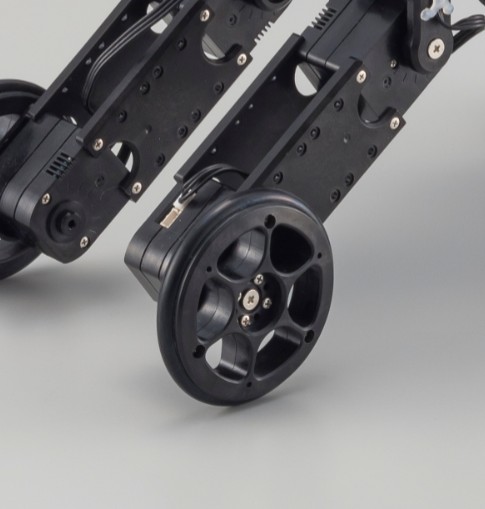
■軸数:12軸(3302:12個)
KXR-R4LL ローバーLL型のLLはロングレッグの略です。文字通り脚の長いローバーで、関節にサーボが入っていますので車高をリニアに変えることができます。これを利用して、段差のある場所も楽々と移動することが可能です。
※こちらのマニュアル、サンプルプロジェクトはこちらからダウンロードしてご利用ください。
※このロボットを組み立てるために追加でパーツの用意が必要です。詳細はこちらをご覧ください。
【KXRシリーズの特徴】
■パーツの組み合わせで改造ができます。
KXRのキットをベースに、パーツを組合せるだけで簡単に目的に応じたロボットに組み換えることが可能です。
■特殊素材のパーツ群
アームやジョイントパーツ類は、ガラス繊維入りの強化樹脂を採用し、耐久性が高くロボットの激しい動作に十分耐える強度を確保しています。
■さらに組みやすくなったパーツ構成
パーツの組合せによる拡張性を確保しつつ、組み立てやすさがアップしました。詳細な組立説明書が付属しますので、手順通りに組み立を行えば本格的なロボットを組み上げることができます。
■拡張性のあるバックパック
バックパックには、ロボットの頭脳となるコントロールボードのほかに、ジャイロセンサーや加速度センサー、無線コントローラの受信機を搭載することが可能です。
※センサー、無線コントローラーは別売りです。
■キット内容でできること

本セットはロボット本体のみのシンプルな構成です。付属のUSBアダプターを使用して有線でPCと通信します。PCにインストールされた専用ソフトHeartToHeart4を使用することで、ロボットのメンテナンスから、モーションの作成と登録、再生まですべて行うことができます。
このキットにオプションの各種センサーやユニットを追加することで、無線操縦や歩行の自動補正などを行うことができます。
■専用モーション作成ソフトに対応
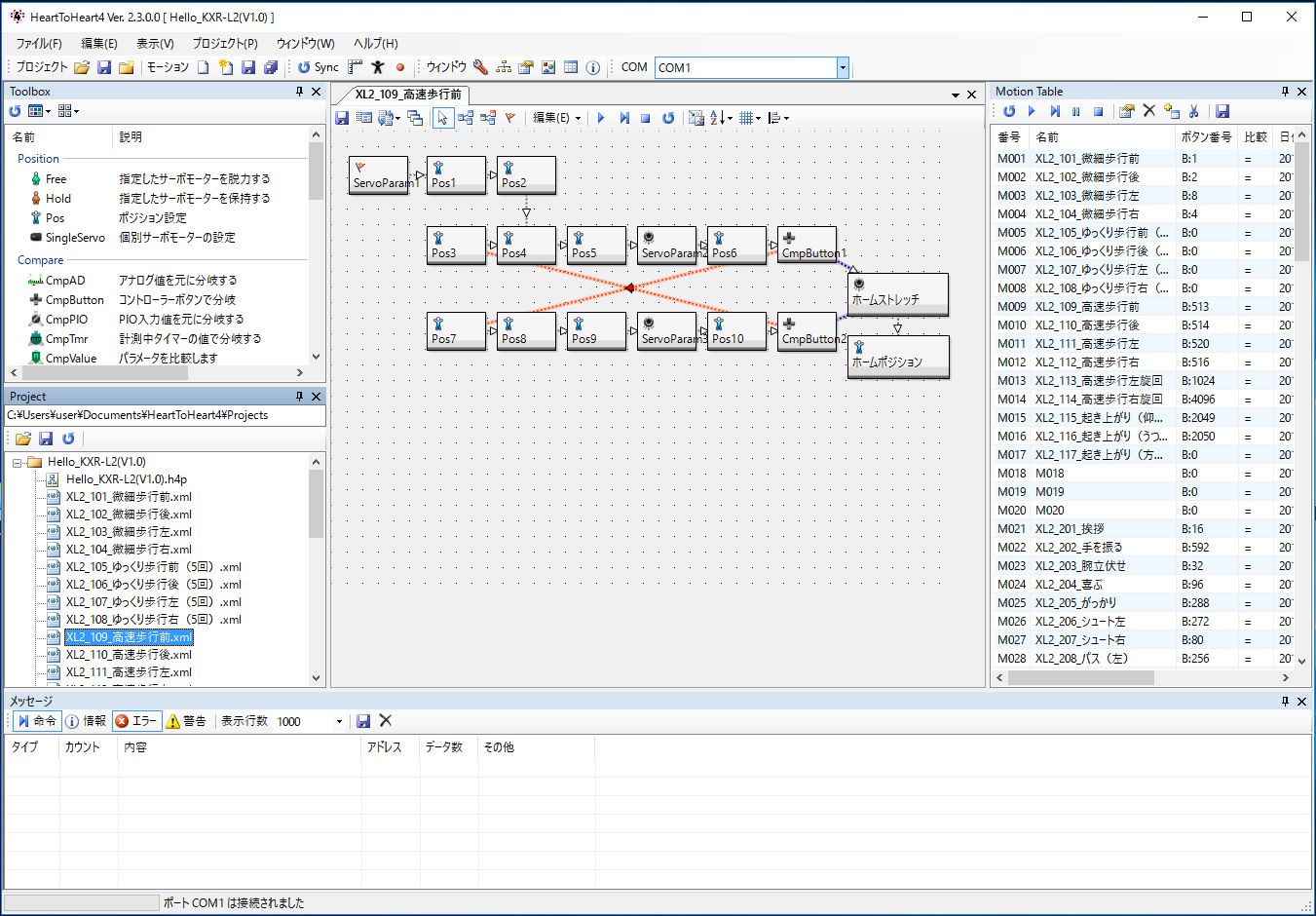
KXRは、モーション作成ソフトHeartToHeart4を無料ダウンロードにてご利用いただけます。このソフトを使用することで、プログラム言語を使用することなく、マウス操作で簡単にモーションを作ることができます。さらに、「教示機能」を使用すれば、ロボットに取らせたポーズをソフトに読み込むことができますので、さらに簡単にモーション作成が可能です。
その他、ロボットのメンテナンスやバッテリーの電圧チェックも可能です。
プログラミングソフト「HeartToHeart4」の使い方を解説した特設ページを公開中です。
 『HeartToHeart4講座』
『HeartToHeart4講座』
■多数のサンプルモーションが付属

KXR-L6、L4D恐竜型、L2Gグリッパーハンド付きやこれまで発売された各キットのモーションが付属します。歩行などの基本動作は、組み立てた後登録するだけで簡単に動作させることが可能です。
■小型充電器が付属

KXRのセットにはUSB接続タイプの小型充電器が付属します。
こちらは、スマートフォンの充電などで使用するUSB対応のACアダプターに対応しています。1~2A出力タイプのACアダプターにてご利用ください。
ACアダプターはセットには付属していませんので、別途ご用意をお願いします。
【ご注意ください】
こちらの充電器はPCや電気機器のUSBから充電することはできません。
PCから充電した場合、PC本体が破損する可能性がありますので
絶対に接続しないよう、ご注意をお願い致します。
【おすすめオプション】

・無線送信機:KRC-5FH (1セット)
手元のコントローラーでボタン操作によるロボットの無線操縦が可能になります。セットには受信機が付属していますので、こちらのセットのみで無線化に対応します。
搭載方法はこちらをご覧ください。
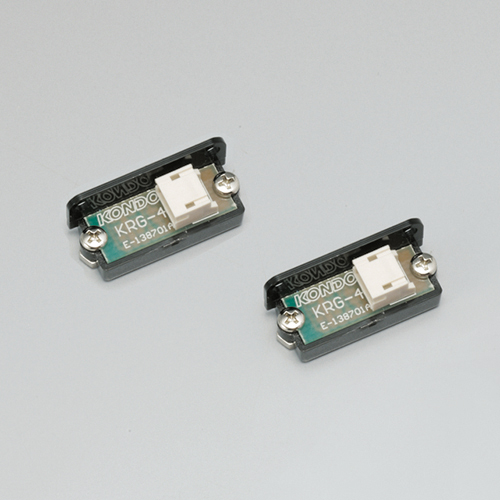
・KRG-4 Bセット(ZH⇔ZH付属) 2個入り (1セット)
ロボットの姿勢を検知し、歩行を自動補正するためのセンサーです。このジャイロセンサーは一軸のみ検知するセンサーですので前後方向と左右方向用に2個使用します。二足歩行ロボットにお勧めです。
搭載方法はこちらをご覧ください。
ロボットが転倒した際に、仰向けかうつ伏せかを検知し、起き上がりモーションを自動で判断することができます。こちらは3軸検知できますので、1個搭載します。
搭載方法はこちらをご覧ください。
※RAS-2/2Cは搭載できませんのでご注意ください。
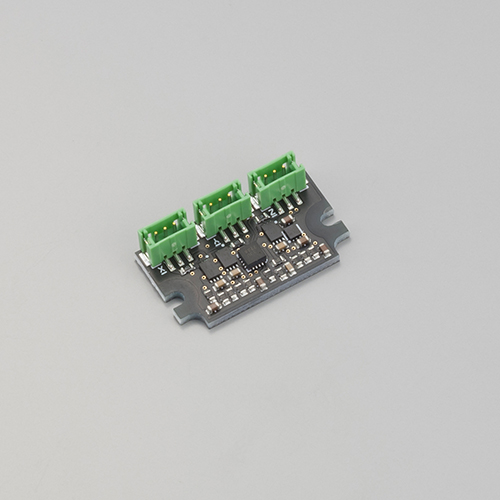
KXR用オプションボード搭載セットを使用することにより、KXRのバックパックにArduino UNOを固定することができます。ICS変換基板やRCB-4変換基板、シールド、ケーブルやビスも付属します。Arduino UNOのみ別途ご用意ください。
・KXR用オプションボード搭載セットC(RCB-4変換基板)
・KXRプログラミング学習用シールドセット(Arduino用)

測距センサー:PSDセンサー Bセット(ZH⇔PH付属)
赤外線を使った三角測量を応用した方式で、高精度・高速に物体との距離を検出します。RCB-4miniに接続して距離を計測しながら簡単な自律制御が可能です。詳細はこちらをご覧ください。
商品のお問い合わせは、こちらのお問合せフォームからご連絡ください。
商品をご購入される場合は、こちらのお取扱店リストをご参照ください。
関連するオプション
-

KRC-6FS 送受信機セット
コード: 03244 ¥18,150 (税込)KRC-6FSはロボット用無線コントローラです。各ボタンを押すことで、そこに割り当てられたモーションを再生することができます。小型で使いやすく、操縦に便利な機能も多数備えています。
-

KRG-5 Bセット(ZH⇔ZH付属) 2個入り
コード: 03214 ¥9,900 (税込)ロボットの姿勢制御に最適なジャイロセンサ。搭載することで二足歩行ロボットの歩行時の安定性が良くなります。RCB-4miniに最適なケーブルが付属します。
-

KRS-3302 ICS
コード: 03146 オープンKRS-3302 ICSは、キューブタイプデザインの小型サーボです。新規に採用された角型モータによりトルクがアップし、保持力も強化されました。
●最大トルク:6.7kg・cm
●最高スピード:0.16s/60° -

KRS-3304R2 ICS
コード: 03170 オープンKRS-3304 ICSは、キューブタイプデザインの小型サーボです。コアレスモータを採用し、標準サイズのサーボに負けない最大トルク13.9kgf・cm(7.4V時)を出力します。R2はICS3.6にバージョンアップしました。
●最大トルク:13.9kgf・cm
●最高スピード:0.11s/60° -

ROBOパワーセル Eタイプ 6N-800mAh(Ni-MH)
コード: 02335 ¥3,850 (税込)ロボット用ニッケル水素バッテリー。KXRシリーズ標準品です。KXR用バッテリーボックスにちょうど収まるサイズです。
-

PSDセンサー Bセット(ZH⇔PH付属)
コード: 03125 ¥2,420 (税込)赤外線を使った三角測量を応用した方式で、高精度・高速に物体との距離を検出します。約20cmの接続ケーブルが付属しています。RCB-4miniの他、アナログ入力を持つZHコネクタ接続の各コントロールボードと組み合わせて使用可能です。
-

KXR用オプションボード搭載セットA
コード: 03143 ¥6,380 (税込)Arudino UNOをKXRシリーズのバックパックに搭載するための板金と、ビス、ケーブルのセットです。ICS変換基板、シールドも一式付属します。
-
RAS-3 Bセット(ZH⇔ZH付属)
コード: 03123 ¥4,180 (税込)3軸加速度センサー。ロボットが倒れた際の起き上がり判定など、ロボットの姿勢を検出するために使用します。
-

KONDOオリジナルビスケース
コード: 02333 ¥330 (税込)ビスや細かいパーツの収納に最適です。